







欠驱动系统是控制数量小于自由度的一类非线性系统,因其结构简单、能耗低、硬件成本低等优点,在航天航空、机器人等领域被广泛应用。具有旋转激励的平移振荡器(Translational Oscillators with Rotating Actuator,简称TORA)作为其中一种典型的欠驱动系统,该模型原本作为双自旋航天器的简化模型用来研究共振现象,其组成结构包括一个不可直接驱动的平移振荡小车和一个可直接驱动的旋转小球。本次报告的控制目标是运用模糊控制,实现对TORA系统的轨迹跟踪,考虑了有摩擦和无摩擦的两种情况,并且检测了加入外界干扰时系统的控制特性。除此之外,本次报告还结合了神经网络,使神经网络仿真的曲线逼近系统的角度变化曲线。
1,TORA系统的动态模型
图1-1 TORA系统的动态模型
TORA系统的动力学方程如下所示:
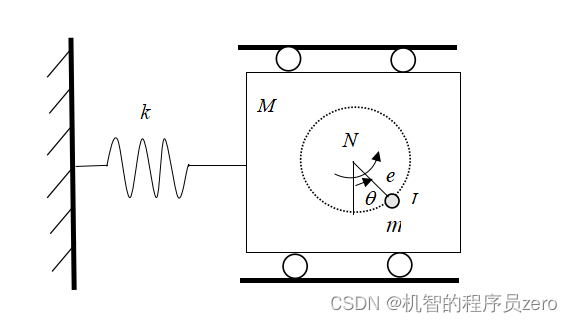
其中,小车的质量为,弹簧的弹性系数为;可驱动小球的质量为,关于质心的转动惯量为,质心距离旋转轴的距离为;、分别代表小车偏离平衡点的水平位移和速度;以小球逆时针偏离竖直方向为正方向,、分别代表旋转小球旋转角度、角速度;、分别表示小车的加速度和可驱动小球的角加速度;表示施加到旋转小球上的输入转矩。
将动力学方程写成矩阵形式:
其中,
由动力学模型可知,TORA系统需要通过唯一的控制输入控制小车的平移位移和小球的旋转角度。
2,期望轨迹设定
TORA系统各自由度之间存在非线性耦合,当平移小车的运动状态实现目标周期性轨迹跟踪时,需要控制旋转小球与平移小车保持相对静止,使得稳定在定值确保运动轨迹周期不变。
设定驱动小球达到的定值为:
其中,为旋转小球与x轴的关系角,,。
设定的目标周期性轨迹表示为:
其中,、、分别为给定动态轨迹的初始位置、振幅、初相角。
3,模糊控制设计
由于TORA系统的状态变量多达四个:小车的位移及速度,小球的转角和角速度。若每个变量划分7个模糊集,则模糊规则会达到2401条,显然这么多规则是不宜实现的。为解决以上情况,在控制器前加一个线性融合函数,将这四个变量融合为综合误差和综合误差变化率,将状态变量减为两个,模糊规则也减至49条。设计的控制系统结构如下:
设计融合函数的步骤:
1,设定状态反馈矩阵为;
2,构造融合函数为
3,得到融合误差和融合误差率为
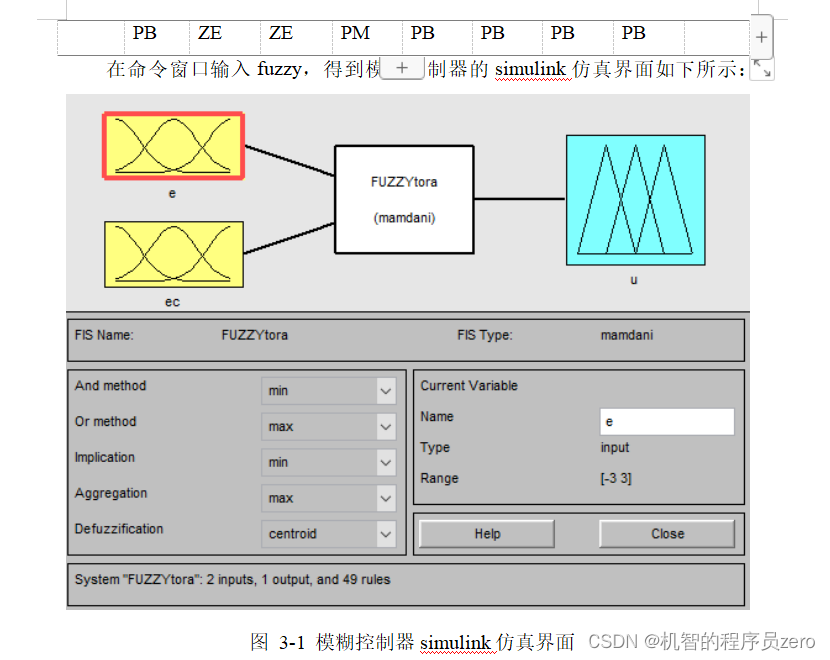
模糊控制器的输入量为和,输出量为,模糊论域为,模糊论域对应的量化因子分别为、,比例因子为。模糊输入输出都采用三角形、全交迭、均匀分布的隶属函数,每个变量用7个模糊子集[NB,NM,NS,ZE,PS,PM,PB]描述,模糊规则如表1,模糊控制器采用常见的重心法来实现解模糊化。
表1 模糊规则表
u ec
e NB NM NS ZE PS PM PM
NB NB NB NB NB NM NM ZE
NM NB NB NB NB NM NM ZE
NS NM NM NM NM ZE ZE PS
ZE NM NM NS ZE PS PM PM
PS NS NS ZE PM PM PM PM
PM ZE ZE PM PB PB PB PN
PB ZE ZE PM PB PB PB PB
在命令窗口输入fuzzy,得到模糊控制器的simulink仿真界面如下所示:















 1347
1347











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











