






引言
在嵌入式系统开发中,通信是至关重要的一部分。USART(通用同步 / 异步收发传输器)作为一种常见的串行通信接口,广泛应用于各种设备之间的数据传输。本文将详细介绍 USART 的工作原理、特点,并给出基于 STM32 单片机的代码实现示例。
一、USART 原理
1. 基本概念
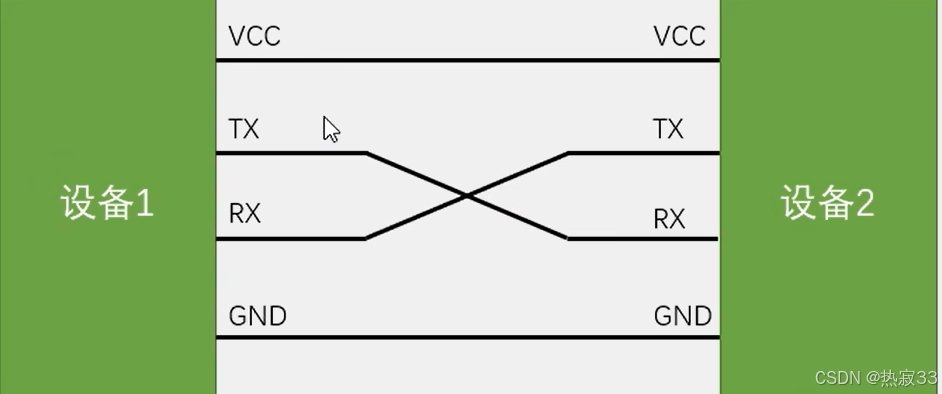
USART 通信通常需要两根数据线,分别是发送线(TX)和接收线(RX)。在异步通信模式下,这两根线就足以完成数据的双向传输;而在同步通信模式下,还需要额外的时钟线(CLK)来同步发送和接收端的操作。此外,如果需要进行硬件流控制,还会用到请求发送(RTS)和清除发送(CTS)两根线。
2. 以 STM32 为例的引脚说明
以 STM32F103 系列单片机为例,不同的 USART 通道对应着不同的 GPIO 引脚。以下是 USART1 的引脚分配情况:
- 发送引脚(TX):通常连接到 PA9 引脚。当单片机要发送数据时,数据会通过这个引脚以串行的方式发送出去。
- 接收引脚(RX):一般连接到 PA10 引脚。外部设备发送过来的数据会通过这个引脚被单片机接收。
- 时钟引脚(CLK,同步模式使用):如果使用同步通信模式,USART1 的时钟信号会从 PA8 引脚输出,用于同步发送和接收端的操作。
- 请求发送引脚(RTS,硬件流控制使用):在需要硬件流控制时,RTS 信号从 PA12 引脚输出,用于向对方设备请求发送数据。
- 清除发送引脚(CTS,硬件流控制使用):CTS 信号从 PA11 引脚输入,用于接收对方设备的允许发送信号。
3. 电平匹配问题
在进行 USART 通信时,要特别注意发送端和接收端的电平匹配问题。常见的电平标准有 TTL(晶体管 - 晶体管逻辑)和 RS - 232 等。
- TTL 电平:一般单片机的 USART 接口输出的是 TTL 电平,高电平通常为 3.3V 或 5V,低电平为 0V。如果通信双方都是单片机或者使用 TTL 电平的设备,那么可以直接连接。
- RS - 232 电平:RS - 232 是一种常用的串行通信标准,其电平范围与 TTL 不同,高电平为 - 3V 到 - 15V,低电平为 + 3V 到 + 15V。如果要实现单片机与 RS - 232 设备的通信,就需要使用电平转换芯片,如 MAX232 等,将 TTL 电平转换为 RS - 232 电平,反之亦然。
4. 数据格式
USART 传输的数据通常以帧为单位,每一帧包含起始位、数据位、校验位和停止位。
- 起始位:用于标识一帧数据的开始,通常为一个逻辑低电平。
- 数据位:要传输的实际数据,常见的数据位长度有 5 位、6 位、7 位和 8 位。
- 校验位:用于检测数据传输过程中是否发生错误,常见的校验方式有奇校验、偶校验和无校验。
- 停止位:用于标识一帧数据的结束,通常为 1 位、1.5 位或 2 位逻辑高电平。

5. 波特率
波特率是指每秒传输的二进制位数,它决定了数据传输的速度。常见的波特率有 9600、115200 等。在进行 USART 通信时,发送端和接收端的波特率必须保持一致,否则会导致数据传输错误。
二、USART 的特点
1. 灵活性高
USART 支持同步和异步两种通信模式,这使得它能够适应不同的应用场景。例如,在与一些简单的外部设备(如温度传感器、湿度传感器等)进行通信时,可以选择异步通信模式,以简化电路设计和降低成本;而在与高速数据采集设备或其他需要精确时序控制的设备通信时,则可以选择同步通信模式,以满足高速和高精度的要求。
2. 可靠性强
通过校验位的设置,USART 可以在一定程度上检测数据传输过程中的错误。当校验结果不一致时,接收端可以采取相应的措施,如请求重传数据,从而提高数据传输的可靠性。此外,USART 还具备硬件流控制功能,可以在数据传输过程中进行流量控制,避免数据丢失。
3. 应用广泛
由于其简单易用、成本低等特点,USART 被广泛应用于各种嵌入式系统中。在工业自动化领域,USART 可以用于 PLC(可编程逻辑控制器)与传感器、执行器之间的通信;在智能家居领域,它可以实现智能门锁、智能插座等设备与网关之间的数据交互;在医疗设备中,USART 也可以用于数据的采集和传输。
三、基于 STM32 的 USART 代码实现
1. 初始化 USART
//USART.c
#include "stm32f10x.h"
void USART1_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 使能 GPIOA 和 USART1 时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
// 配置 USART1 Tx (PA9) 为复用推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// 配置 USART1 Rx (PA10) 为浮空输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
// USART1 配置
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
// 使能 USART1 接收中断
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
// 使能 USART1
USART_Cmd(USART1, ENABLE);
// 配置 NVIC
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}配置原理图如下:
2. 发送数据
void USART1_SendByte(uint8_t byte)
{
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1, byte);
}
void USART1_SendString(char* str)
{
while (*str)
{
USART1_SendByte(*str++);
}
}3. 接收数据中断处理函数
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
uint8_t data = USART_ReceiveData(USART1);
// 处理接收到的数据
// 这里简单地将接收到的数据原样发送回去
USART1_SendByte(data);
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}4. 主函数
int main(void)
{
USART1_Init();
while (1)
{
USART1_SendString("Hello, USART!\r\n");
for (int i = 0; i < 1000000; i++); // 简单延时
}
}
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









