






目录
一、中断
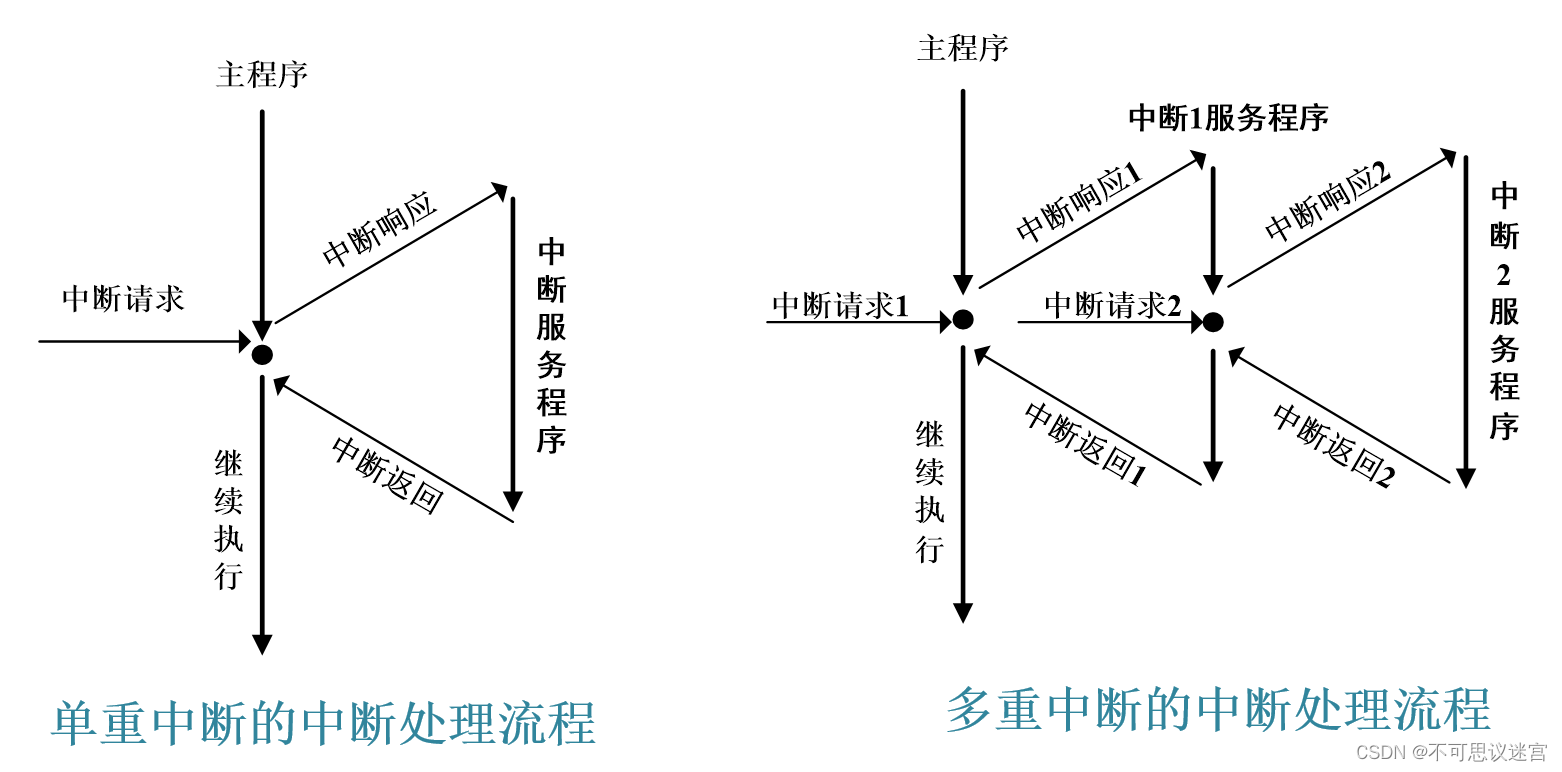
中断处理流程:中断请求、中断响应、中断服务和中断返回。以下分别是单重中断与多重中断的处理流程。
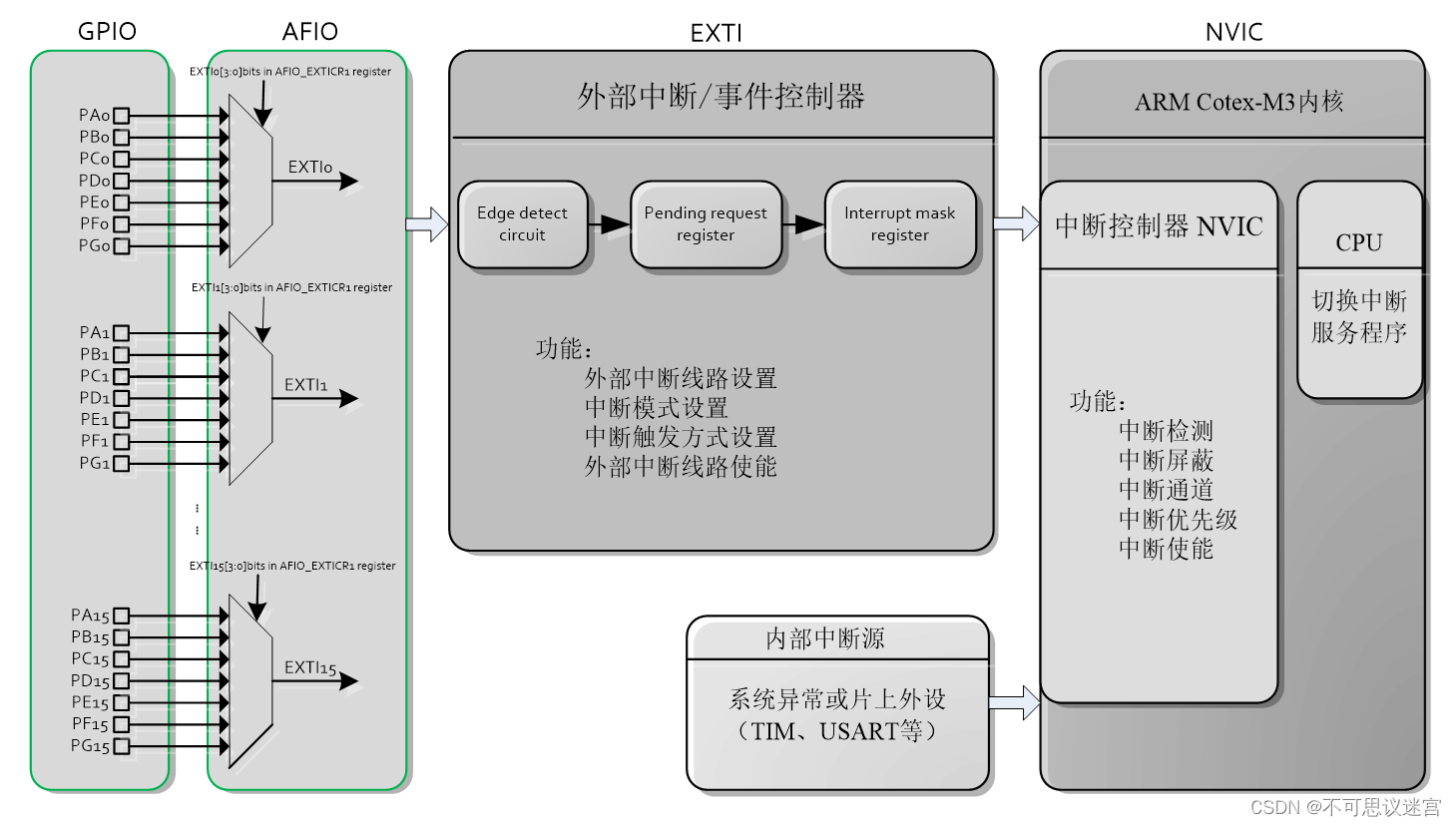
STM32的内部中断处理机制。
标准库中断基本函数:
1.NVIC中断优先级函数
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup)//中断分组管理函数
void NVIC_Init(NVIC_InitTypeDef*NVIC_InitStruct) //中断初始化函数
void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset);
void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState);
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource);2.外部中断EXTI标准外设库接口函数
EXTI_Init //定义了EXTI_InitTypeDef结构体
EXTI_GetITStatus //用于检查指定的EXTI线路触发请求发生与否,返回值:SET或RESET
EXTI_ClearITPendingBit //用于清除EXTI线路挂起位
GPIO_EXTILineConfig //用于选择GPIO管脚用作外部中断线路二、实例分析
1.中断模式编程控制LED亮灭
要求:用stm32F103核心板的GPIOA端一管脚接一个LED,GPIOB端口一引脚接一个开关(用杜邦线模拟代替)。采用中断模式编程,当开关接高电平时,LED亮灯;接低电平时,LED灭灯。
代码实现如下。
exti_key.c文件。
#include "exti_key.h"
#include "misc.h"
void EXTI_Key_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE|RCC_APB2Periph_AFIO,ENABLE);
//开启I/O端口的时钟和复用时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
//初始化I/O口为浮空输入模式
GPIO_Init(GPIOA,&GPIO_InitStructure);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
//设置中断的优先级分组
NVIC_InitStructure.NVIC_IRQChannel = EXTI3_IRQn;
//配置中断源,IRQ通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
//配置抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;
//配置响应优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
//使能中断通道
NVIC_Init(&NVIC_InitStructure);
EXTI_InitTypeDef EXTI_InitStructure;
//EXTI模式
EXTI_ClearITPendingBit(EXTI_Line3);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOE,GPIO_PinSource3);
//设置I/O引脚与中断线路的映射关系
EXTI_InitStructure.EXTI_Line = EXTI_Line3;
//设置外部中断线3中断
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
//设置为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
//触发类型
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
//使能该外部中断线
EXTI_Init(&EXTI_InitStructure);
}
main.c文件。
#include "stm32f10x.h"
#include "LED1.h"
#include "exti_key.h"
int main(void)
{
LED_Init();
GPIO_ResetBits(GPIOB,GPIO_Pin_5);
EXTI_Key_Init();
while(1)
{
}
}
void EXTI3_IRQHandler(void)
{
if(EXTI_GetITStatus(EXTI_Line3) != RESET)
//判断某个线上的中断是否发生
{
GPIO_WriteBit(GPIOB,GPIO_Pin_5,(BitAction)((1-GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_5))));
EXTI_ClearITPendingBit(EXTI_Line3);
//清除中断标志
}
}
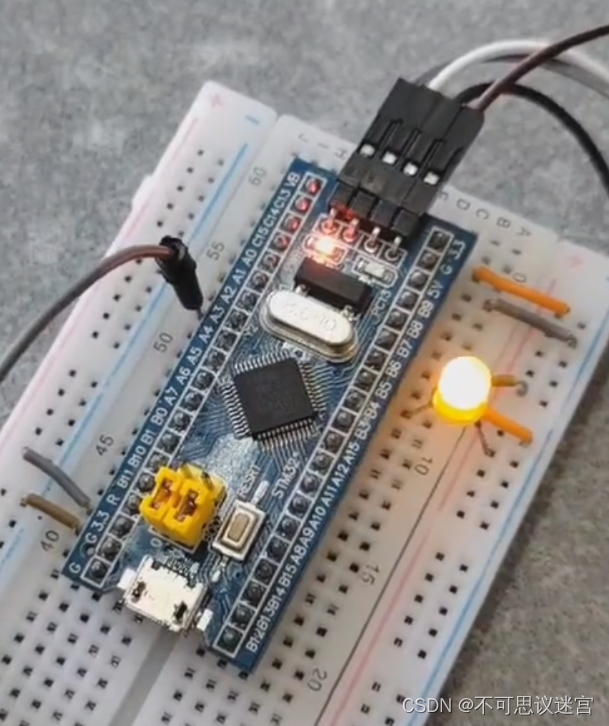
开发板展示。
2.验证串口对中断是否有延迟
要求:在上述main函数while循环中加入一个串口每隔1s发送一次字符的代码片段,观察按键中断对串口发送是否会带来干扰或延迟。
代码实现,在实例1的代码基础上,增加如下Serial.c文件,同时在main函数中使用Serial_SendByte函数打印字符。
#include "stm32f10x.h" // Device header
#include <stdio.h>
void Serial_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;//定义结构体变量
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed =GPIO_Speed_50MHz;//给三个结构体变量赋值
GPIO_Init(GPIOA,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed =GPIO_Speed_50MHz;//给三个结构体变量赋值
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate=9600;//设置波特率为9600
USART_InitStructure.USART_WordLength=USART_WordLength_8b;//数据位占8位
USART_InitStructure.USART_StopBits=USART_StopBits_1;//1位停止位
USART_InitStructure.USART_Parity=USART_Parity_No;//无校验
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_Init(USART1,&USART_InitStructure);
USART_Cmd(USART1,ENABLE);
}
void Serial_SendByte(uint8_t Byte)//显示字符,参考ASCII字符集,例如发送A,Byte=0x41或者‘A’
{
USART_SendData(USART1,Byte);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
int fputc(int ch,FILE *f)
{
Serial_SendByte(ch);
return ch;
}
在串口助手中调试后发现串口不会对中断造成延时。
3.接收字符发送“hello windows!”
要求:当stm32接收到1个字符“s”时,停止持续发送“hello windows!”; 当接收到1个字符“t”时,持续发送“hello windows!”。
代码实现如下。
#include "stm32f10x.h"
#include "Delay.h"
int send=0;//设置标志位
void hellowindows()
{
if(send==1)
{
int i;
char a [14]={'h','e','l','l','o','w','i','n','d','o','w','s','!',' '};
for (i = 0; i < 14; i++)
{
USART_SendData(USART1,a[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
Delay_s(1);
}
}
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
uint8_t receivedChar = USART_ReceiveData(USART1);
if (receivedChar == 's')
{
send = 0;
}
else if (receivedChar == 't')
{
send = 1;
}
}
}
int main(void)
{
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength= USART_WordLength_8b;
USART_InitStructure.USART_StopBits= USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_Init(USART1, &USART_InitStructure);
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//当USART串口接收到数据的时候,就触发USART中断
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //设置抢占(主)优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; // 设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
while(1)
{
hellowindows();
}
}
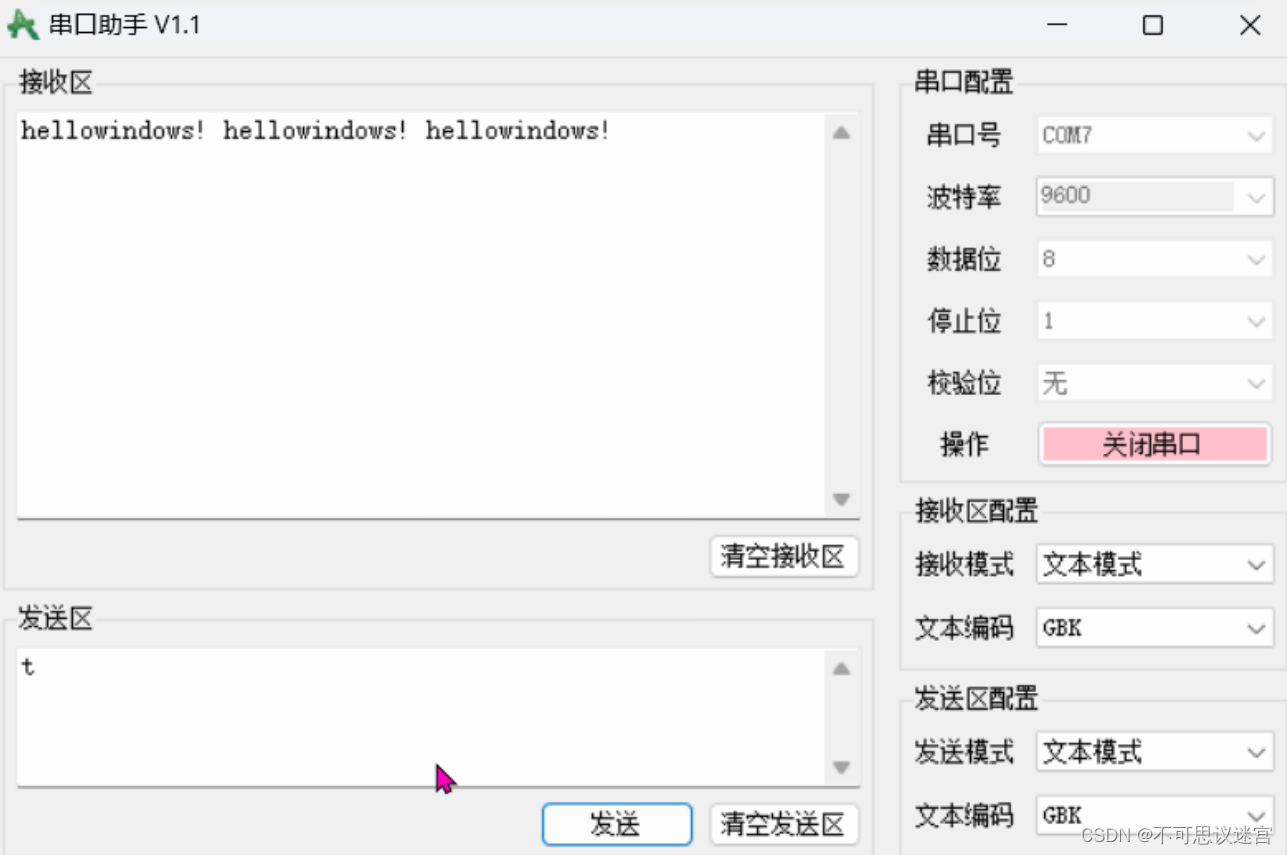
在串口助手中进行调试可以观察到如下效果。
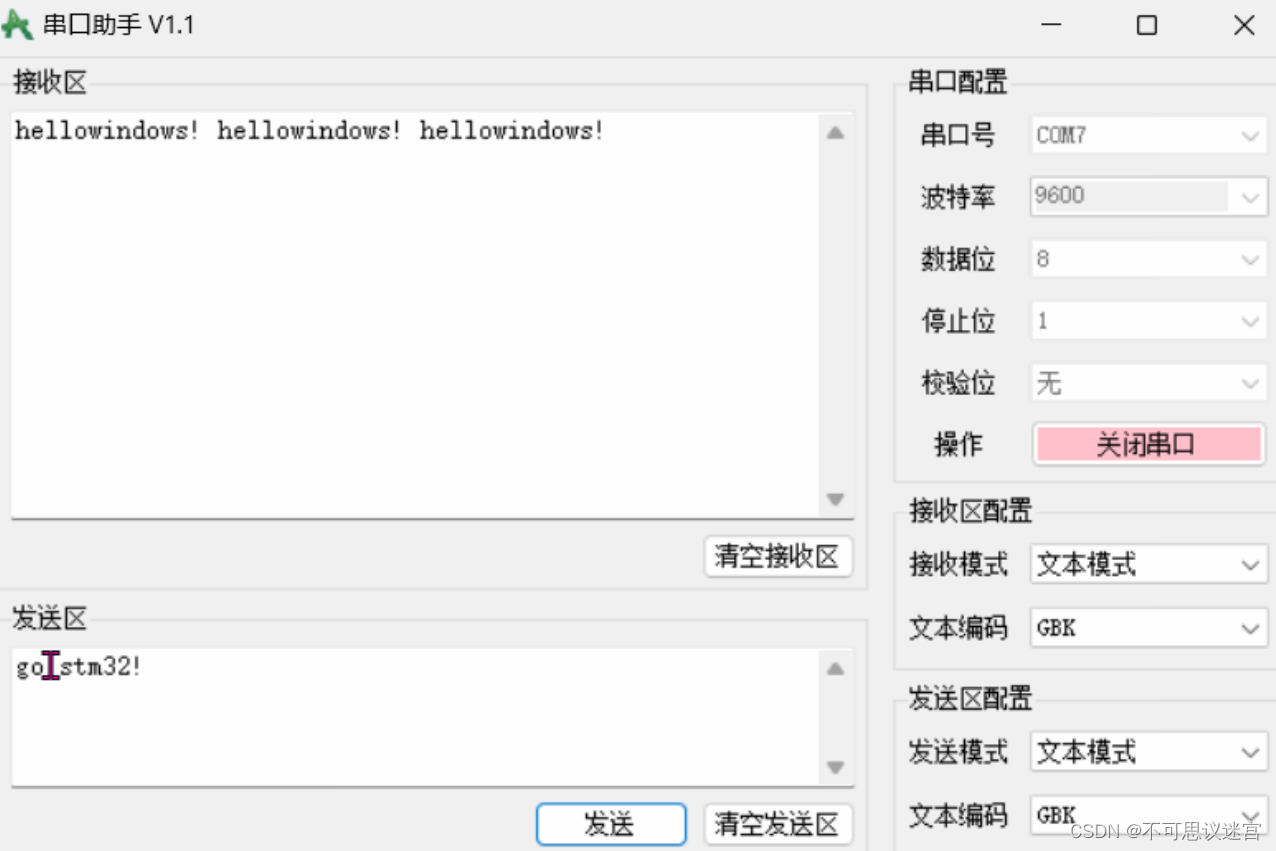
4.接收字符串发送“hello windows!”
要求:当stm32接收到字符“stop stm32!”时,停止持续发送“hello windows!”; 当接收到字符“go stm32!”时,持续发送“hello windows!”。
#include "stm32f10x.h"
#include "Delay.h"
int send=0; //全局变量,记录状态
int count=0; //全局变量,表示缓冲区的数组的下标
char receive_data[11]; //接收缓存区
void receive_data_init() //接收缓存区初始化
{
count=0;
for(int i=0;i<11;i++)
{
receive_data[i]=0;
}
}
void hellowindows()
{
if(send==1)//当send为1,输出hellowindows!
{
int i;
char a [14]={'h','e','l','l','o','w','i','n','d','o','w','s','!',' '};
for (i = 0; i < 14; i++)
{
USART_SendData(USART1,a[i]);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
Delay_s(1);//延时1s
}
}
void USART1_IRQHandler(void)//中断函数,接收数据存入接收缓冲区
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)//判断中断是接收数据中断
{
receive_data[count]= USART_ReceiveData(USART1); //接收字符
count++;
}
}
int main(void)
{
USART_InitTypeDef USART_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1|RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP;
GPIO_Init(GPIOA,&GPIO_InitStructure );
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA,&GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength= USART_WordLength_8b;
USART_InitStructure.USART_StopBits= USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_Mode=USART_Mode_Tx|USART_Mode_Rx;
USART_InitStructure.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
USART_Init(USART1, &USART_InitStructure);
USART_ClearFlag(USART1, USART_FLAG_TC);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//当USART串口接收到数据的时候,就触发USART中断
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; //设置抢占(主)优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; // 设置子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_Cmd(USART1, ENABLE);
receive_data_init();//初始化接收缓存区
while(1)
{
hellowindows();
if ( strcmp(receive_data,"stop stm32!")==0)
{
send = 0;//结束发送
receive_data_init();
}
else if (strcmp(receive_data,"go stm32!")==0)
{
send = 1;//发送数据
receive_data_init();//重新初始化接收缓存区,以便下次接收数据
}
}
}
在串口助手中进行调试可以观察到如下效果。
三、总结
通过标准库函数进行了stm编程中的中断操作,对于stm编程的认识在逐渐加深,南都也在加大,我还需要多加练习。















 365
365

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









