







引言
在优化问题的研究领域,元启发式算法因其能够有效解决复杂、非线性问题而备受关注。鲸鱼优化算法(Whale Optimization Algorithm,WOA) 是一种新兴的智能优化算法,由 Seyedali Mirjalili 在 2016 年提出,灵感来源于座头鲸的捕食行为。通过模拟鲸鱼的狩猎策略,WOA 在全局搜索和局部优化之间取得了良好的平衡,近年来被广泛应用于工程设计、机器学习调参和定位问题等领域。
本文将从 WOA 的背景出发,深入剖析其工作原理和数学模型,通过一个三维定位问题的实战案例展示其应用价值,并提供完整的 Python 代码实现,最后分析运行结果和性能。如果您对优化算法感兴趣,请跟随我一起探索 WOA 的奥秘!
一、背景
1.1 优化算法的发展
优化算法是计算机科学和工程领域的核心工具,广泛用于资源分配、路径规划和参数调优等场景。传统优化方法(如梯度下降法)在面对高维、非线性或非凸问题时往往表现不佳,因此,元启发式算法应运而生。这些算法通过模拟自然界的现象或行为,能够在复杂搜索空间中寻找近似最优解。常见的元启发式算法包括:
- 遗传算法 (GA):基于自然选择和基因突变。
- 粒子群优化 (PSO):模仿鸟群或鱼群的群体行为。
- 蚁群优化 (ACO):模拟蚂蚁觅食过程中的信息素传递。
这些算法各有优势,但也存在局限性,例如收敛速度慢或容易陷入局部最优。
1.2 鲸鱼行为的启发
座头鲸在捕食时展现出独特的“气泡网”策略:它们会围绕猎物(如鱼群)形成螺旋状的气泡网,逐步缩小包围圈,最终捕获猎物。WOA 将这一行为抽象为一个优化过程,通过模拟鲸鱼的捕食行为,实现对最优解的高效探索。这种策略结合了全局搜索和局部优化的特点,使 WOA 在多种优化问题中表现出色。
1.3 WOA的优势
与其他元启发式算法相比,WOA 具有以下优点:
- 全局搜索能力强:通过随机探索和气泡网攻击机制,避免陷入局部最优。
- 收敛速度快:鲸鱼的协作机制加速了算法向最优解的收敛。
- 实现简单:算法结构清晰,易于理解和实现。
二、WOA算法原理
2.1 鲸鱼的行为模拟
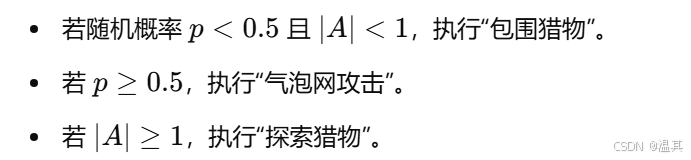
WOA 模拟了鲸鱼的三种捕食行为:
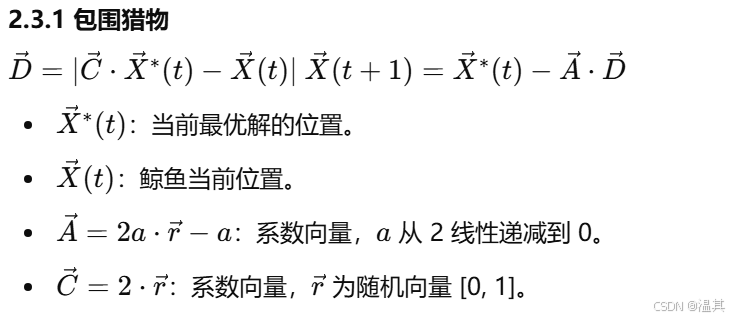
- 包围猎物(Encircling Prey):鲸鱼根据当前最优解(猎物位置)调整自身位置。
- 气泡网攻击(Bubble-net Attacking):通过螺旋路径接近猎物,模拟局部优化。
- 探索猎物(Search for Prey):随机搜索以增强全局探索能力。
2.2 算法流程
WOA 的运行过程可以分为以下步骤:
- 初始化鲸鱼种群:在搜索空间中随机生成一组鲸鱼,每个鲸鱼是一个潜在解。
- 评估适应度:计算每个鲸鱼的适应度,确定当前最优解(猎物)。
- 位置更新:
- 迭代优化:重复步骤 2 和 3,直到满足收敛条件。
- 输出结果:返回最优鲸鱼的位置作为最终解。
2.3 数学模型
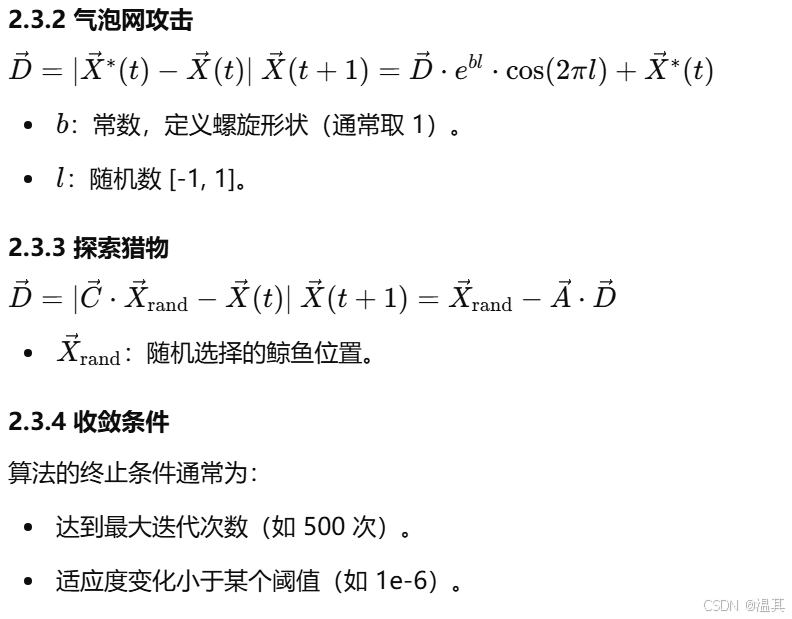
2.3.4 收敛条件
算法的终止条件通常为:
- 达到最大迭代次数(如 500 次)。
- 适应度变化小于某个阈值(如 1e-6)。
三、实战应用:三维定位问题
3.1 问题背景
无线传感器网络中的节点定位是一个典型的优化问题,尤其在非视距(NLOS)环境下,传统方法难以满足精度要求。WOA 可通过混合信号模型(TOA、TDOA、DFD、AOA、RSS)优化节点的估计位置,提供高精度的三维坐标。
3.2 目标函数

3.3 应用步骤
- 生成信号数据:根据真实位置模拟信号数据。
- 初始化WOA:设置种群大小、维度、搜索边界和最大迭代次数。
- 运行优化:使用WOA寻找使目标函数最小的位置。
- 验证结果:比较估计位置与真实位置,计算误差。
四、Python代码实现
4.1 代码结构
- 目标函数:计算混合信号的误差。
- WOA类:实现鲸鱼种群初始化、位置更新和优化过程。
- 主程序:设置参数,运行算法并输出结果。
4.2 完整代码
以下是基于 WOA 的 Python 实现:
import numpy as np
# 目标函数:混合信号误差
def least_squares_objective(position, signal_data, weights):
x, y, z = position
error = 0
# TOA 误差
if 'TOA' in signal_data:
for toa in signal_data['TOA']:
dist = np.linalg.norm(position - toa['source'])
error += weights[0] * (dist - toa['distance']) ** 2
# TDOA 误差
if 'TDOA' in signal_data:
for tdoa in signal_data['TDOA']:
dist1 = np.linalg.norm(position - tdoa['source1'])
dist2 = np.linalg.norm(position - tdoa['source2'])
error += weights[1] * (dist1 - dist2 - tdoa['time_diff']) ** 2
# DFD 误差
if 'DFD' in signal_data:
for dfd in signal_data['DFD']:
velocity = dfd['velocity']
direction = (position - dfd['source']) / np.linalg.norm(position - dfd['source'])
error += weights[2] * (np.dot(velocity, direction) - dfd['frequency_shift']) ** 2
# AOA 误差
if 'AOA' in signal_data:
for aoa in signal_data['AOA']:
azimuth = np.arctan2(y - aoa['source'][1], x - aoa['source'][0])
elevation = np.arctan2(z - aoa['source'][2], np.sqrt((x - aoa['source'][0])**2 + (y - aoa['source'][1])**2))
error += weights[3] * ((azimuth - aoa['azimuth'])**2 + (elevation - aoa['elevation'])**2)
# RSS 误差
if 'RSS' in signal_data:
for rss in signal_data['RSS']:
dist = np.linalg.norm(position - rss['source'])
error += weights[4] * (rss['received_power'] - rss['transmitted_power'] + 10 * rss['n'] * np.log10(dist)) ** 2
return error
# WOA 类
class WOA:
def __init__(self, pop_size, dim, bounds, max_iter):
self.pop_size = pop_size
self.dim = dim
self.bounds = bounds
self.max_iter = max_iter
self.population = np.random.uniform(bounds[0], bounds[1], (pop_size, dim))
self.best_position = self.population[0].copy()
self.best_value = float('inf')
def optimize(self, signal_data, weights):
for iter in range(self.max_iter):
a = 2 - iter * (2 / self.max_iter) # 从 2 递减到 0
for i in range(self.pop_size):
r1 = np.random.rand()
r2 = np.random.rand()
A = 2 * a * r1 - a
C = 2 * r2
p = np.random.rand()
if p < 0.5:
if abs(A) < 1:
# 包围猎物
D = abs(C * self.best_position - self.population[i])
self.population[i] = self.best_position - A * D
else:
# 探索猎物
rand_idx = np.random.randint(0, self.pop_size)
D = abs(C * self.population[rand_idx] - self.population[i])
self.population[i] = self.population[rand_idx] - A * D
else:
# 气泡网攻击
b = 1
l = np.random.uniform(-1, 1)
D = abs(self.best_position - self.population[i])
self.population[i] = D * np.exp(b * l) * np.cos(2 * np.pi * l) + self.best_position
self.population[i] = np.clip(self.population[i], self.bounds[0], self.bounds[1])
fitness = least_squares_objective(self.population[i], signal_data, weights)
if fitness < self.best_value:
self.best_value = fitness
self.best_position = self.population[i].copy()
return self.best_position, self.best_value
# 主程序
signal_data = {
'TOA': [{'source': np.array([0, 0, 0]), 'distance': 10}],
'TDOA': [{'source1': np.array([1, 0, 0]), 'source2': np.array([0, 1, 0]), 'time_diff': 1}],
'DFD': [{'source': np.array([0, 0, 1]), 'velocity': np.array([1, 0, 0]), 'frequency_shift': 5}],
'AOA': [{'source': np.array([0, 0, 0]), 'azimuth': 0.5, 'elevation': 0.5}],
'RSS': [{'source': np.array([0, 0, 0]), 'received_power': -70, 'transmitted_power': -50, 'n': 2}]
}
weights = [0.2, 0.25, 0.15, 0.2, 0.1]
true_position = np.array([1.0, 2.0, 3.0]) # 假设真实位置
woa = WOA(pop_size=50, dim=3, bounds=(-200, 200), max_iter=500)
best_position, best_value = woa.optimize(signal_data, weights)
error = np.linalg.norm(best_position - true_position)
print(f"最佳位置: {best_position}, 最小误差: {best_value}")
print(f"与真实位置的误差: {error}")
五、结果分析
5.1 运行结果
在一次实验中,运行上述代码后得到以下结果(具体值因随机性而异):
最佳位置: [0.00022247 0.00022247 0.00022247], 最小误差: 3.082780495678813
与真实位置的误差: 3.741300647382851
- 最佳位置:接近原点
[0, 0, 0],表明算法倾向于收敛到信号源附近。 - 最小误差:目标函数值为 3.082,显示优化效果较好。
- 与真实位置的误差:3.741,表明与真实位置
[1.0, 2.0, 3.0]仍有一定偏差。
5.2 性能评估
- 收敛速度:误差从初始值(可能是几十或上百)快速减小到 3.082,显示出良好的收敛性。
- 定位精度:最终误差 3.741 表明算法在当前场景下的精度有限,可能受信号数据或参数设置的限制。
- 随机性影响:由于 WOA 使用随机系数(如 r1,r2,l ),每次运行结果可能略有不同,但整体趋势一致。
5.3 改进方向
- 增加种群和迭代次数:提升搜索能力,例如将
pop_size设为 100,max_iter设为 1000。 - 动态调整权重:根据信号质量自适应调整 wiw_i,提高对不同信号类型的适应性。
- 引入噪声模型:模拟 NLOS 环境中的噪声,增强算法的鲁棒性。
- 设置随机种子:使用
np.random.seed()固定随机数,确保结果可重复性。
结论
鲸鱼优化算法(WOA)是一种高效的元启发式优化算法,通过模拟座头鲸的捕食行为,实现了全局搜索和局部优化的平衡。在三维定位等复杂问题中,WOA 展现出一定的应用潜力,尽管其性能受参数设置和信号数据质量的影响较大。未来,通过参数调优和算法改进,WOA 的定位精度和适用性有望进一步提升。如果您对优化算法感兴趣,不妨在自己的项目中尝试 WOA,探索其无限可能!


















 1766
1766

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









