









代码部分
第一部分
--------------------------------------------------------------------------------------------------------------------------
1、编码器函数
Encoder.c
GPIO初始化,定时器初始化,设置编码器模式,清除标志位,中断配置,开定时器
#include "encoder.h"
//初始化GPIO口:A0/A1为TIM2;B6/B7为TIM4
void Encoder_TIM2_Init(void)
{
//1、GPIO口开启
GPIO_InitTypeDef GPIO_InitStruct;//定义GPIO口初始化结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;//定义定时器初始化结构体
TIM_ICInitTypeDef TIM_ICInitStruct;//定义结构体
//2、开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIO开启时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//开启定时器时钟
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;//初始化GPIO--PA0、PA1,浮空输入
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_0 |GPIO_Pin_1;//TIM2的口
//这里不用速度因为编码器式读取它的速度数据并不是向外输出
GPIO_Init(GPIOA,&GPIO_InitStruct);
//TIM_InternalClockConfig(TIM2);
TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct);//初始化定时器##
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;//定时器的时钟分割(不分)
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;//定时器的计数模式(向上计数)
TIM_TimeBaseInitStruct.TIM_Period=65535;//定时器的重装载值
TIM_TimeBaseInitStruct.TIM_Prescaler=0;//定时器的分频系数(不分)
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStruct);
//4、输入捕获
TIM_EncoderInterfaceConfig(TIM2,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);//配置编码器模式,(定时器,模式三,上升沿,上升沿)
TIM_ICStructInit(&TIM_ICInitStruct);//初始化输入捕获##
TIM_ICInitStruct.TIM_ICFilter=10;//滤波器
TIM_ICInit(TIM2,&TIM_ICInitStruct);
//5、其他函数,清除本身定时器的标志位
TIM_ClearFlag(TIM2,TIM_FLAG_Update);//(计数,计数溢出之后标志位会拉高,要把这个标志位清除一下)
TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);//配置溢出更新中断标志位
//因为编码器从一开始就要捕获通道的计数值,刚开始一定要为零,如果不是零基础就会错了,所以要清零定时器计数值
TIM_SetCounter(TIM2,0);//清零定时器计数值(设置为0,即清零)
//6、开启计时器
TIM_Cmd(TIM2,ENABLE);//开启定时器
}
void Encoder_TIM4_Init(void)
{
//1、GPIO口开启
GPIO_InitTypeDef GPIO_InitStruct;//定义GPIO口初始化结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;//定义定时器初始化结构体
TIM_ICInitTypeDef TIM_ICInitStruct;//定义结构体
//2、开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//GPIO开启时钟
//3、配置编码器
//开启定时器(tim.c)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);//开启定时器时钟
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IN_FLOATING;//初始化GPIO--PA0、PA1,浮空输入
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_6 |GPIO_Pin_7;//TIM2的口
//这里不用速度因为编码器式读取它的速度数据并不是向外输出
GPIO_Init(GPIOB,&GPIO_InitStruct);
TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct);//初始化定时器##
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;//定时器的时钟分割(不分)
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;//定时器的计数模式(向上计数)
TIM_TimeBaseInitStruct.TIM_Period=65535;//定时器的重装载值
TIM_TimeBaseInitStruct.TIM_Prescaler=0;//定时器的分频系数(不分)
TIM_TimeBaseInit(TIM4,&TIM_TimeBaseInitStruct);
//4、输入捕获
TIM_EncoderInterfaceConfig(TIM4,TIM_EncoderMode_TI12,TIM_ICPolarity_Rising,TIM_ICPolarity_Rising);//配置编码器模式,(定时器,模式三,上升沿,上升沿)
TIM_ICStructInit(&TIM_ICInitStruct);//初始化输入捕获##
TIM_ICInitStruct.TIM_ICFilter=10;//滤波器
TIM_ICInit(TIM4,&TIM_ICInitStruct);
//5、其他函数,清除本身定时器的标志位
TIM_ClearFlag(TIM4,TIM_FLAG_Update);//(计数,计数溢出之后标志位会拉高,要把这个标志位清除一下)
TIM_ITConfig(TIM4,TIM_IT_Update,ENABLE);//配置溢出更新中断标志位
//因为编码器从一开始就要捕获通道的计数值,刚开始一定要为零,如果不是零基础就会错了,所以要清零定时器计数值
TIM_SetCounter(TIM4,0);//清零定时器计数值(设置为0,即清零)
//6、开启计时器
TIM_Cmd(TIM4,ENABLE);//开启定时器
}
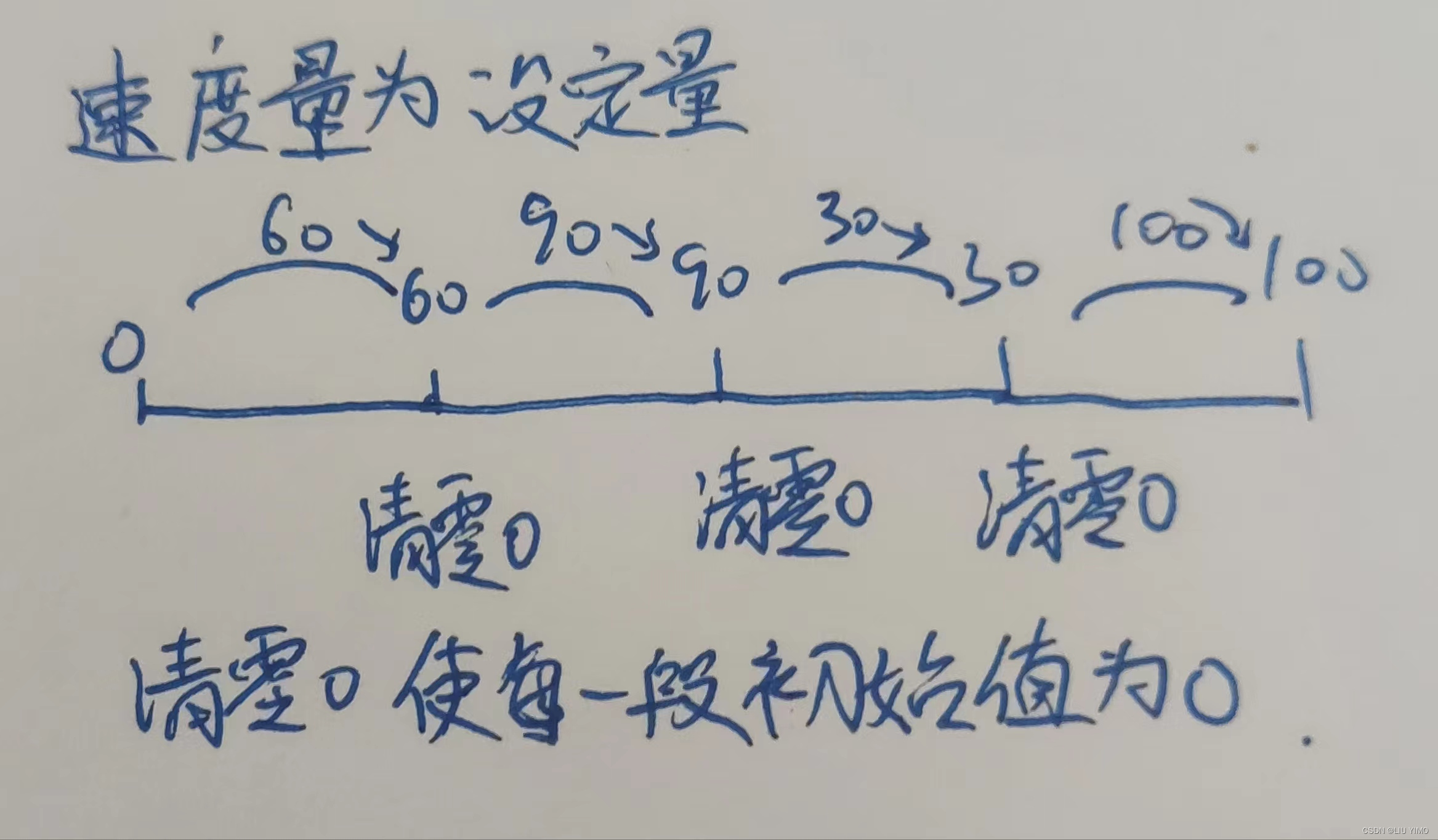
//读取速度
//编码器读取函数入口参数为定时器
//编码器读的实际上是编码电机用的位移量,而不是速度,现在写的是读取速度
int Read_Speed(int TIMx)//传定时器,并且执行操作:1.采集编码器的计数值并保存;2.将定时器的计数值清零
{
int value_1;//把读取的计数器的值给一个变量让他保存后,定时器清零
switch(TIMx)
{
case 2:{value_1 = (short)TIM_GetCounter(TIM2); TIM_SetCounter(TIM2,0);};break;//记得转类型,TIM_GetCounter()是短整型int short
case 4:{value_1 = (short)TIM_GetCounter(TIM4); TIM_SetCounter(TIM4,0);};break;
default:value_1=0;
}
return value_1;
}
//中断函数,中断之后要找一个地址给他寻过去(寻址)
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2,TIM_IT_Update)!=0)
{
TIM_ClearITPendingBit(TIM2,TIM_IT_Update);
}
}
void TIM4_IRQHandler(void)
{
if(TIM_GetITStatus(TIM4,TIM_IT_Update)!=0)//标志位不等于0,说明他已经进入了中断,这时候把它清零
{
TIM_ClearITPendingBit(TIM4,TIM_IT_Update);
}
}
对于编码器函数

参数为(定时器,模式,极性,极性)
这里讲极性,但是点进去定义会发现成了上升沿或者下降沿:

原因:在stm32f10x_tim.c,(1294行),“/*set the TI1 and the TI2 Polarities*/”,

去中文手册找查找CCER,找到通用计时器
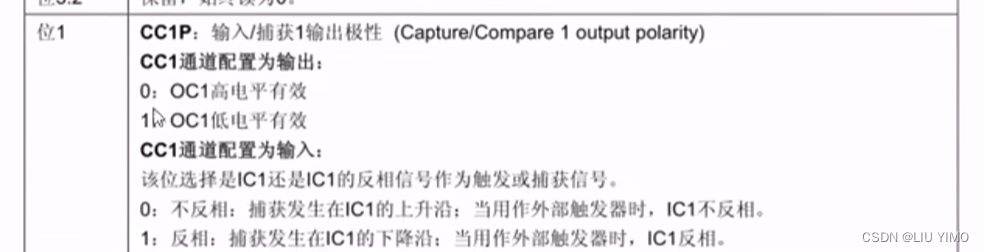
找到CC1,编码器为输入
第二个参数:
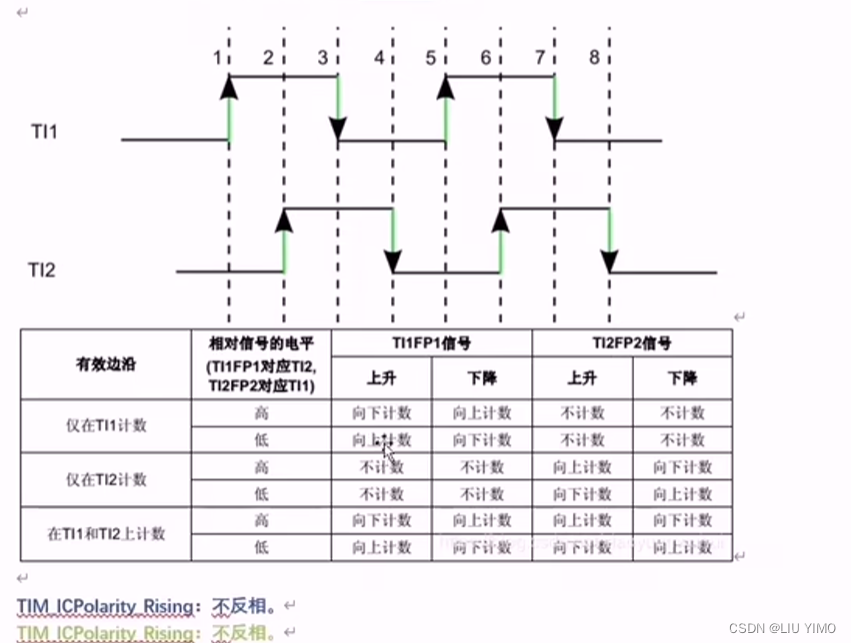
TI1:在T1的所有边沿计数
TI2:在T2的所有边沿计数
TI12:在T1和T2的所有边沿计数
Encoder.h
#ifndef _ENCODER_H
#define _ENCODER_H
#include "sys.h"
void TIM2_IRQHandler(void);
void TIM4_IRQHandler(void);
int Read_Speed(int TIMx);
void Encoder_TIM2_Init(void);
void Encoder_TIM4_Init(void);
#endif
----------------------------------------------------------------------------------------------------------------------------
2、PWM控制
PWM.c
GPIO初始化,定时器初始化,输出比较模式初始化,MOE主输出使能,通道预装载使能,使能定时器在ARR寄存器上的预装载寄存器
#include "pwm.h"
//定时器1-PA8\PA11
void PWM_Init_TIM1(u16 Psc,u16 Per)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1 | RCC_APB2Periph_AFIO,ENABLE);//开启时钟
//GPIO空初始化
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP;//初始化GPIO--PA8、PA11为复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8 |GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
//初始化定时器
TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct);//初始化定时器。
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period=Per;//设置变量
TIM_TimeBaseInitStruct.TIM_Prescaler=Psc;//设置参数
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct);//高级定时器1
//输入捕获比较
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1;//初始化输出比较模式:PWM1模式
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;//输出比较极限:计数超过CCR之后,状态为高
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;//输出比较状态
TIM_OCInitStruct.TIM_Pulse=0;//初始脉冲设置为0即可
TIM_OC1Init(TIM1,&TIM_OCInitStruct);//1通道
TIM_OC4Init(TIM1,&TIM_OCInitStruct);//4通道
TIM_CtrlPWMOutputs(TIM1,ENABLE);//高级定时器专属函数--MOE主输出使能(必然要开,不然输出不了PWM波形)
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);//ENABLE//OC1预装载寄存器使能
TIM_OC4PreloadConfig(TIM1,TIM_OCPreload_Enable);//ENABLE//OC4预装载寄存器使能
TIM_ARRPreloadConfig(TIM1,ENABLE);//TIM1在ARR上预装载寄存器使能
TIM_Cmd(TIM1,ENABLE);//开定时器。
}
PWM.h
#ifndef _PWM_H
#define _PWM_H
#include "sys.h"
void PWM_Init_TIM1(u16 Psc,u16 Per);
#endif
------------------------------------------------------------------------------------------------------------------------------
3、MPU6050
Exit.c
GPIO初始化、EXTI外部中断初始化
#include "exti.h"
void MPU6050_EXTI_Init(void)
{
EXTI_InitTypeDef EXTI_InitStruct;//stm32f10x_exit.h
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO,ENABLE);//开启时钟,因为用的是第二功能,所以要开复用时钟AFIO
//MPU中断引脚-PB5
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;//GPIO_Mode_AF_PP//推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;//PB5配置为上拉输入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource5);//外部中断和GPIO映射
EXTI_InitStruct.EXTI_Line=EXTI_Line5;//中断线;5(EXTI_Init->assert_param()中的IS_EXTI_LINE->#define EXTI_Line5)
EXTI_InitStruct.EXTI_LineCmd=ENABLE;//使能
EXTI_InitStruct.EXTI_Mode=EXTI_Mode_Interrupt;//模式:中断触发
EXTI_InitStruct.EXTI_Trigger=EXTI_Trigger_Falling;//边沿触发:下降沿触发
EXTI_Init(&EXTI_InitStruct);
}
Exit.h
#ifndef _EXTI_H
#define _EXTI_H
#include "sys.h"
void MPU6050_EXTI_Init(void);
#endif
4、motor控制
Motor.c
#include "motor.h"
//电机初始化函数
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启时钟
//电机1:PB12\PB13 电机2:PB14/PB15
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;//初始化GPIO--PB12、PB13、PB14、PB15为推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12 |GPIO_Pin_13 |GPIO_Pin_14 |GPIO_Pin_15;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
}
//电机是10kHz,如果分频是1,重装载值是7199,+1=7200,stm32f1就是70兆/7=100us,而100us对应的刚好是10kHZ,刚刚好对应电机频率
//
//int PWM_MAX=7200,PWM_MIN= -7200;//放主函数了main
//限幅函数
void Limit(int *motoA,int *motoB)
{
if(*motoA>PWM_MAX)*motoA=PWM_MAX;//限制在最小和最大区间
if(*motoA<PWM_MIN)*motoA=PWM_MIN;
if(*motoB>PWM_MAX)*motoB=PWM_MAX;
if(*motoB<PWM_MIN)*motoB=PWM_MIN;
}
//绝对值函数(返回正值)
int GFP_abs(int p)
{
int q;
q=p>0?p:(-p);//>0返回p,<0返回-p
return q;
}
//赋值函数
//将PWM写进电机
//入口参数:PID运算完成后的最终PWM值
void Load(int moto1,int moto2)//假设moto1=-200:负号表示反转200个脉冲
{
//1.研究正负号,对应正反转(极性,给逻辑电平)
if(moto1>0)
Ain1=1,Ain2=0;//左电机正转
else
Ain1=0,Ain2=1;//左电机反转
//2.研究PWM值(不需要符号,所以要设置一个绝对值函数来取正)
TIM_SetCompare1(TIM1,GFP_abs(moto1));
//右电机同理
if(moto2>0)
Bin1=1,Bin2=0;
else
Bin1=0,Bin2=1;
TIM_SetCompare4(TIM1,GFP_abs(moto2));
}
//后期
char PWM_Zero=0,stop=0;
void Stop(float *Med_Jiaodu,float *Jiaodu)
{
if(GFP_abs(*Jiaodu-*Med_Jiaodu)>60)
{
Load(PWM_Zero,PWM_Zero);
stop=1;
}
}
Motor.h
#ifndef _MOTOR_H
#define _MOTOR_H
#include "sys.h"
//宏定义几个位带函数
#define Ain1 PBout(14)
#define Ain2 PBout(15)
#define Bin1 PBout(13)/*【4】*/
#define Bin2 PBout(12)
void Stop(float *Med_Jiaodu,float *Jiaodu);
void Motor_Init(void);/*【5】*/
void Limit(int *motoA,int *motoB);
int GFP_abs(int p);
void Load(int moto1,int moto2);
#endif
------------------------------------------------------------------------------------------------------------------------------
------------------------------------------------------------------------------------------------------------------------------
第二部分
(链接可能会失效,在我的主页有这篇)
PID原理
(之前在知乎看到的一篇文章做了笔记)
工程中P必存在,在P的基础上又有PD、PI、PID控制器。
1、三项作用:
比例项P:提高响应速度,减少稳态误差(Kp太小了,Kp太大时会出现震荡)
积分项I:消除稳态误差
微分项D:减少震荡以及超调

稳态误差(Kp太小了,距离目标值有一定的距离)
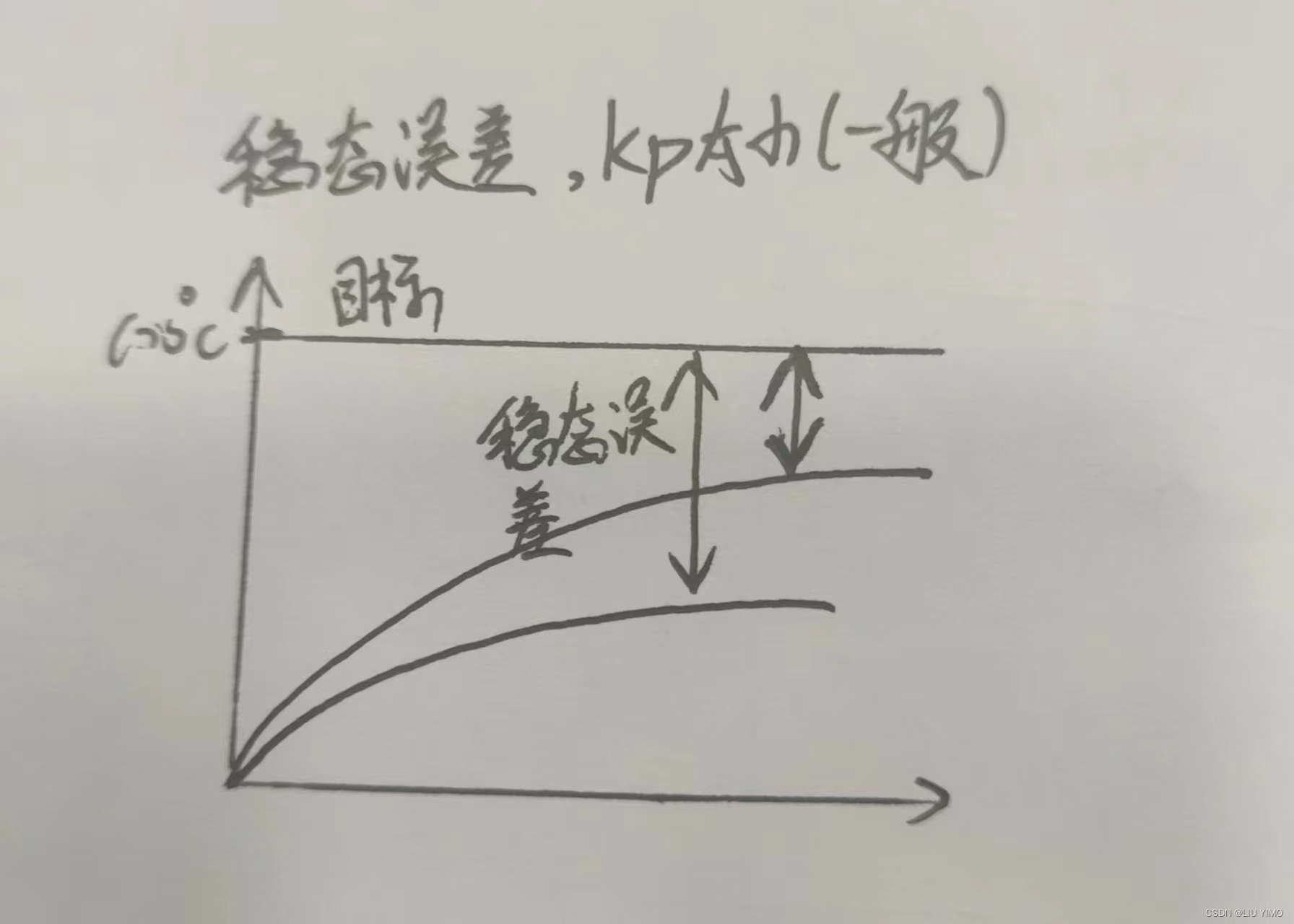
震荡(Kp太大了,在目标值震荡)

2、各项作用解释:
比例项:提高响应速度->上式可见,I和D原本的式子就含有Kp,所以比例项稍微提高一点,这三项都会有一个提升,输出就会比较大的变化,大幅增大,提高了响应速度。稳态误差就是Kp太小导致的,增大Kp即可减少。
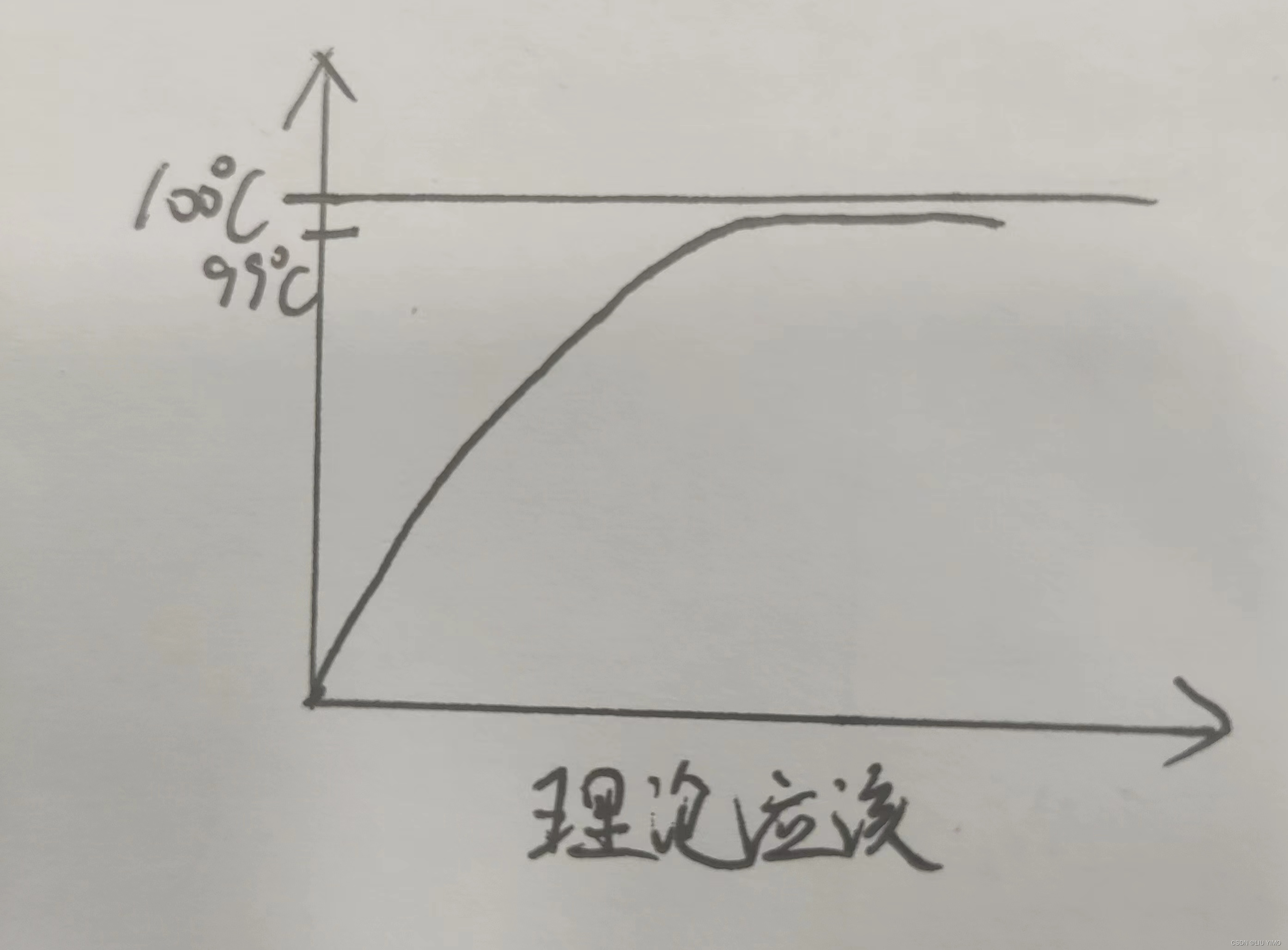
积分项:只要有偏差,就会积分,直至偏差变为0。消除稳态误差
微分项:减少震荡和超调,可以理解为"刹车"(单摆中的阻尼),给式子加了一个负数,负数越大,减少的震荡越明显。
3、PID函数(位置式PID)
位置闭环控制就是根据编码器的脉冲累加测量电机的位置信息,并与目标值比较,得到控制偏差,然后通过对偏差的比例、积分、微分进行控制,使偏差趋向于零的过程。

e(k):本次偏差--------------------------------------
e(n):e(k)以及以前的偏差的累积和,其中k=1,2,......,k------------------------
e(k-1):上一次误差---------------------------------
(PWM相当于u(k),代表输出) ------------Pwm
Bias偏差,Pwm输出,Integral_bias偏差积分,Last_Bias上一次偏差
int Position_PID(int Encoder,int Target)
{
static float Bias,Pwm,Integral_bias,Last_Bias;
Bias=Encoder-Target; //计算偏差
Integral_bias+=Bias;//求出偏差的积分(和)
//位置式PID控制器
Pwm=Position_KP*Bias + Position_KI*Integral_bias+Position_KD*(Bias-Last_Bias);
Last_Bias=Bias;//保存上一次偏差
return Pwm;//输出
}
串级控制系统(两个PID串起来)
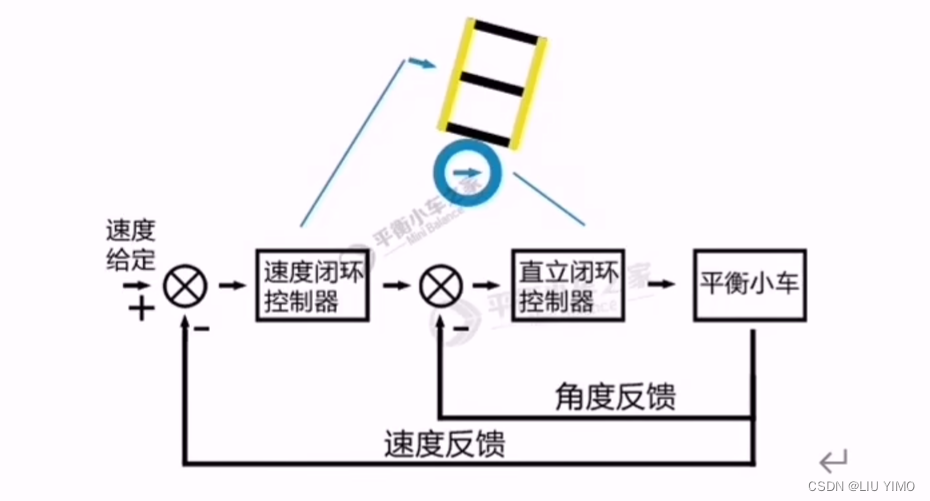
1、直立环
(1)输入:1、给定角度(速度环输出),2、角度反馈
(2)输出:PWM(直接控制小车)
//直立PD控制器输出=Kp1*(真实角度-期望角度)+Kd*角度偏差的微分
//其中角度偏差=真实角度-期待角度
Vertical_out=Kp1*(real_Angle-expect_Angle)+Kd*D(real_Angle-expect_Angle)
2、速度环
(1)输入:1、给定速度,2、速度反馈
(2)输出:角度值(直立环的期望角度输入)
//速度PI控制器输出=Kp2*(反馈编码器值-期望编码器值)+Ki*编码器偏差的积分
//其中编码器偏差=反馈编码器值-期望编码器值
Velocity_out=Kp2*(Encoder_real-Encoder_expect)+Ki*S(Encoder_real-Encoder_expert)
(备注:速度环输出=直立环的期待角度、Kp1:直立环Kp、Kp2:速度环Kp)
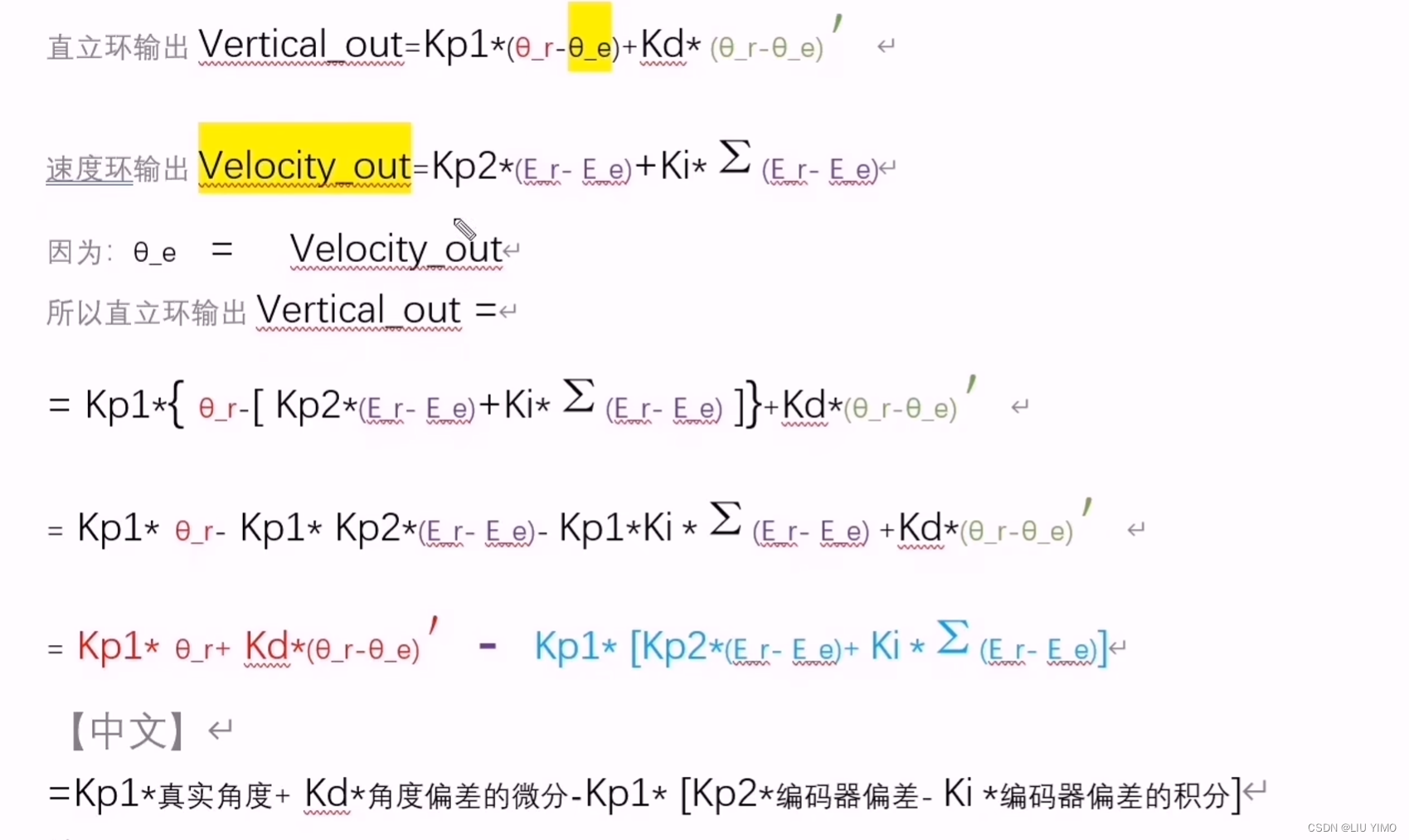
显而易见,红色两项就为直立环式子,只不过角度偏差改成了真实角度,蓝色两项就为速度环式子,只不过多乘了Kp1。并不是真正的直立环和速度环。
编程就按照该式子编写即可。

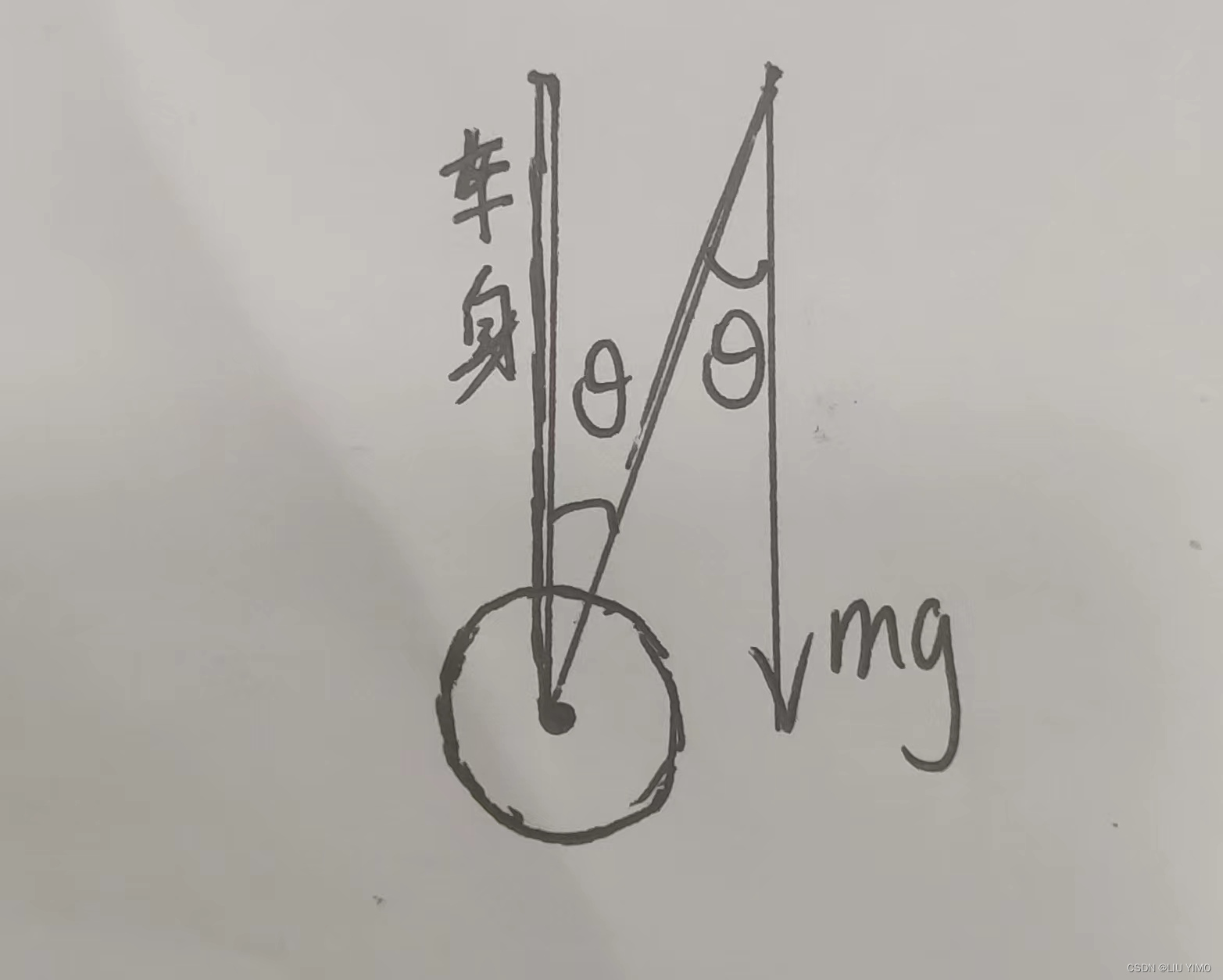
直立环PD(内环)
目的让小车角度趋向于0
小车往哪边倒,车轮就往哪边开,保持车平衡(手持棒)
P是必有的,这里用PD比例微分,不用到积分I
大小与角度成正比、方向与角速度成正比的回复力--------P
大小与角速度成正比、方向与回复力成反比的阻尼力-----D
比例微分控制:PD(out)=Kp*Angle+Kd*(Angle-Angle_last)
即a=b1*+b2*
速度环PI(外环)
目的:让电机速度趋近于0
转向环(无,用了z轴的角速度的系数做了转向环的输出)
平衡小车的控制理论和控制过程的编程
第三部分
PID的调参















 8398
8398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









