






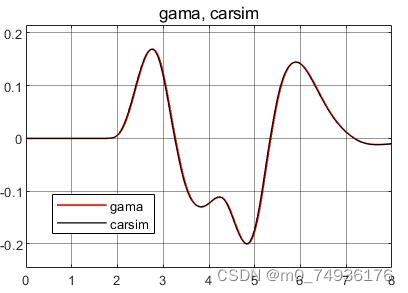
基于扩展卡尔曼滤波(Extended Kalmam Filter, EKF)的车辆状态观测器 Carsim与Simulink联合
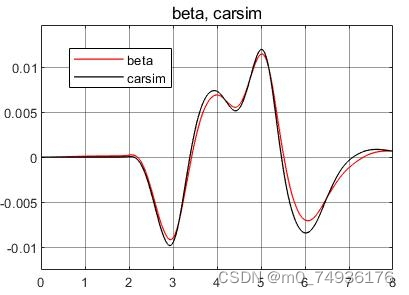
可估计车辆Vx,β,γ(效果见图)
EKF使用子函数形式编程,只要定义好状态方程和观测方程,便可方便的进行二次开发
Carsim2019 MATLAB2020a 可提供对应的低版本simulink文件
带有详细注释和说明文档
Carsim与Simulink联合估计难度与单纯的Simulink模型估计难度不同
ID:12150680386112769 情***集
情***集















 923
923











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









