






目录
1.引言
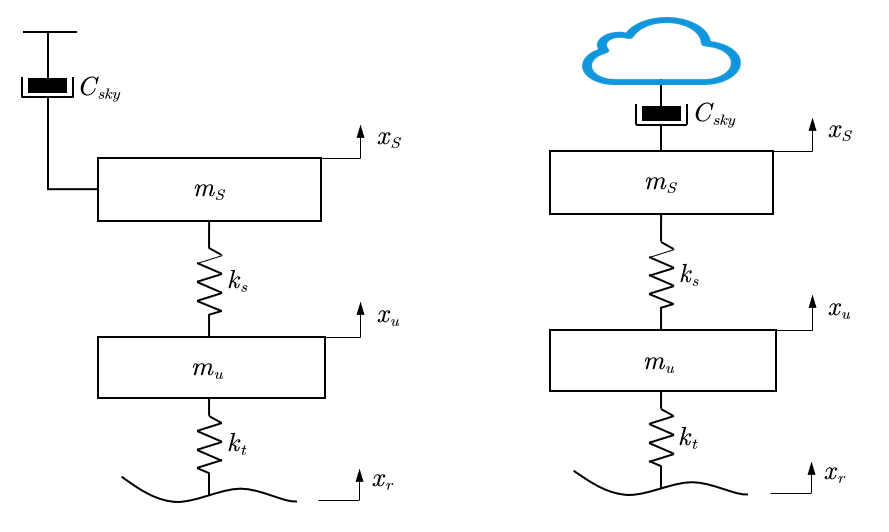
车辆悬架系统直接影响着乘坐舒适性和操控稳定性。传统被动悬架性能固定,难以适应复杂路况;主动悬架虽性能优越但成本过高。半主动悬架通过实时调节阻尼特性,在性能和成本间取得了良好平衡。其中,天棚控制算法(Skyhook Control)是最经典的解决方案之一,其核心思想是模拟一个连接车身与 "天棚" 的虚拟阻尼器,通过抑制车身振动显著提升舒适性,如下图所示。该算法由D.Karnopp 于 1974 年提出,因其原理简单、实现容易且效果显著,不仅成为半主动悬架的基础控制策略,还衍生出地棚控制等多种改进算法。本文将详细解析天棚控制的原理、实现方法,并通过仿真验证其性能优势。
2.控制算法原理
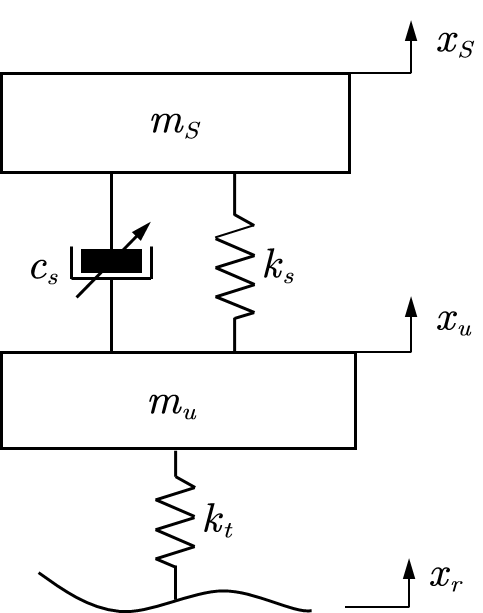
理想天棚阻尼控制到实际阻尼控制的转换过程,本质上是将虚拟的天棚阻尼系数映射为实际可控阻尼系数 cs的可调过程。在实际工程应用中,这一转换体现为对阻尼器可调系数 Cs的连续动态调节。需要特别强调的是,天棚控制(Skyhook)本质上是一种针对车身振动的控制策略。虽然在系统运动微分方程中同时包含了车身和车轮的动力学描述,但为了保持控制策略的纯粹性,我们只需关注以下两个等效关系式即可,这样可以避免车轮动力学对控制策略的干扰。
实际可调阻尼系统状态空间方程和示意图如下:
上述两个方程等效,既可以推导出cs和Csky的关系:
所以天棚控制算法控条件为:
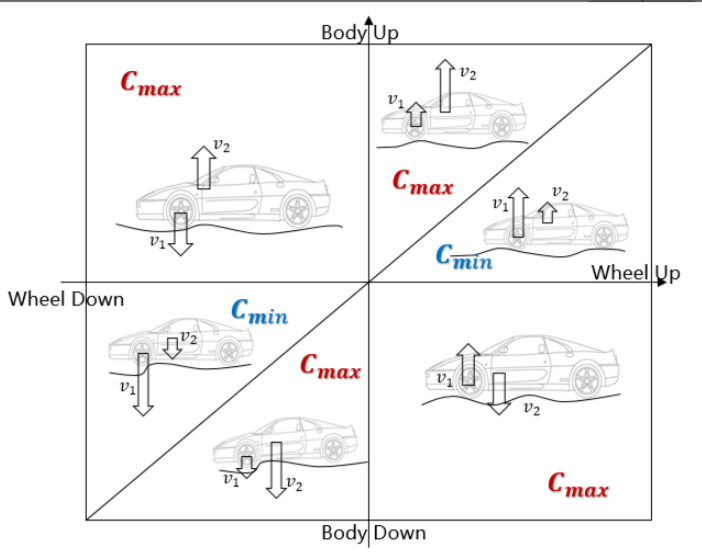
公式中,x表示车身位移,表示减振器行程。 Cin代表减振器的阻尼系数。这个公式的含义是:如果车身位移速度方向与减振器的压缩速度方向相反,则取最小阻尼;而如果车身位移速度方向与减振器压缩速度方向相同,则取最大阻尼。原因参考下图:
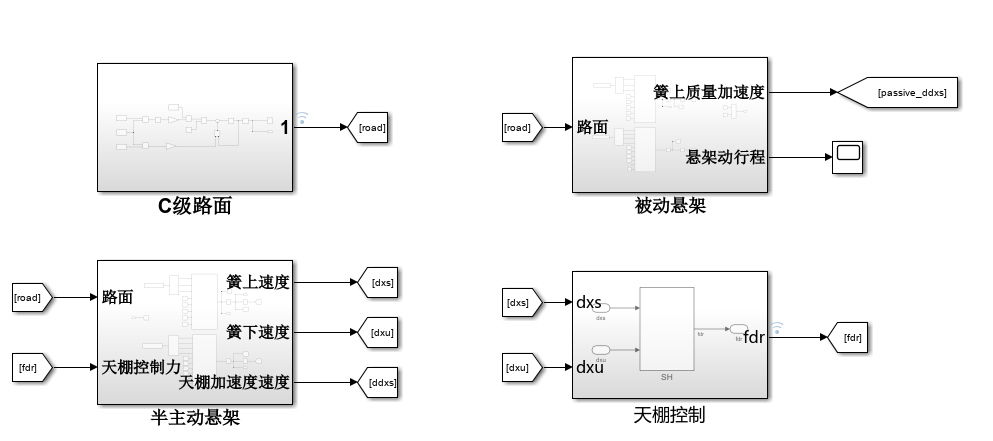
3.控制算法simulink仿真
simulink模型图如下:
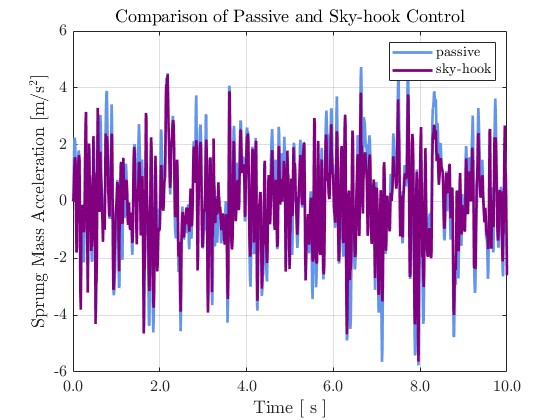
被动悬架和天棚控制效果对比,可以分析出对于舒适性的改善还是比较明显的。簧上质量加速度对比图如下:
注:如需整套模型可私信获取
若您发现文中存在任何不准确或错误的地方,欢迎提出宝贵意见,笔者将会尽快修正并改进。同时,若本文中的任何内容无意中侵犯了某些个人或机构的版权或知识产权,笔者深感抱歉,并愿意及时处理相关事宜,删除或修改相关部分。
本笔记内容仅供学习和交流使用,任何商业用途或其他非法使用行为,请务必遵守相关法律法规,并获得原作者授权。


















 1746
1746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









