






18b基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab/simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型,资料。
(最好用Carsim2016版本及以上版本,模型不是很难,适合新手初步学习)
ID:2718727221370145
雨菲菲98
标题:基于模型预测控制和最优控制理论的汽车主动安全系统设计与仿真
摘要:本文通过结合模型预测控制(MPC)技术和最优控制理论,实现了基于Carsim和Matlab Simulink的汽车主动安全系统,包括主动避撞和自适应巡航(ACC)功能。文章详细介绍了Simulink 模型的设计,包括车辆逆纵向动力学模型、逆发动机模型和切换控制逻辑。此外,还对Carsim模型进行了简要概述。本文对于初学者逐步学习汽车主动安全系统设计具有一定的参考价值。
- 引言
近年来,汽车行业不断推陈出新,逐渐走向自动化驾驶的时代。为了提高汽车行驶的安全性和舒适性,汽车主动安全技术成为了一个重要的研究领域。本文基于模型预测控制和最优控制理论,设计并实现了一套汽车主动安全系统,具有主动避撞和自适应巡航功能。
- 方法
2.1 汽车逆纵向动力学模型设计
在本文中,首先设计了汽车的逆纵向动力学模型,对车辆的加速度、速度和位移进行建模。通过刻画汽车的运动特性,可以更好地实现对车辆的控制。
2.2 汽车发动机逆模型设计
为了准确控制汽车的加速度,我们设计了汽车发动机的逆模型。通过反向建模,能够根据目标加速度,控制车辆的油门位置,从而实现快速且准确的加减速。
2.3 切换控制逻辑设计
在实际行驶过程中,汽车需要根据具体的场景进行不同的控制策略切换。因此,本文设计了切换控制逻辑,根据汽车当前的行驶状态和周围环境,自动切换不同的控制策略,从而实现主动避撞和自适应巡航功能。
- 模型预测控制算法
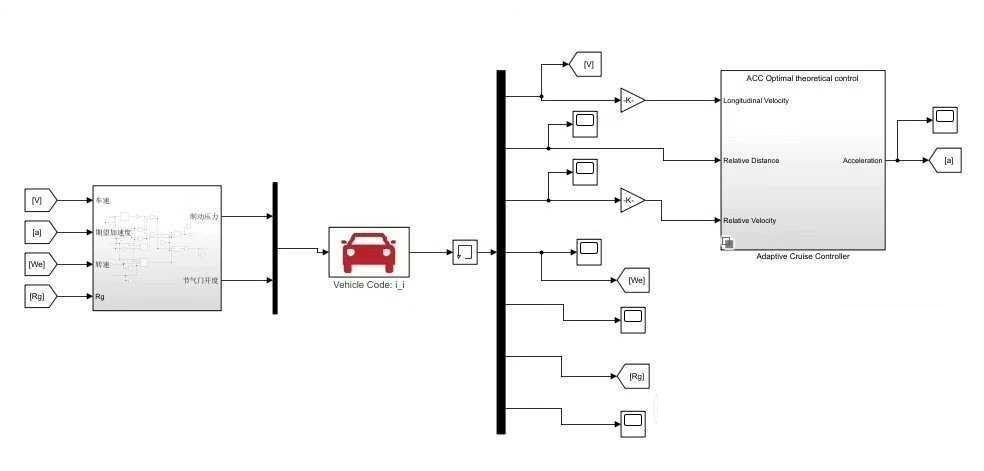
模型预测控制是一种基于模型的控制方法,通过对未来一段时间内的状态进行预测,从而进行优化控制。本文使用Simulink自带的MPC模块,结合上述设计的汽车动力学模型和切换控制逻辑,实现了主动安全系统的控制算法。
- 最优控制理论
最优控制理论是一种在给定约束条件下寻找最优控制策略的数学方法。本文通过应用最优控制理论,优化了汽车的加速度、制动和油门控制策略,从而实现了更加安全和舒适的行驶体验。
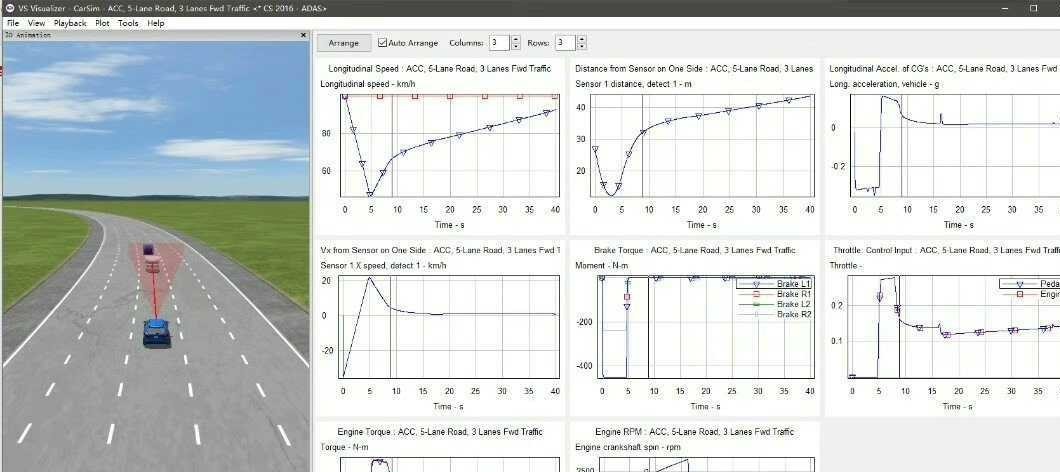
- 车辆行为模拟与仿真实验
为了验证设计的主动安全系统的性能,我们使用Carsim进行了仿真实验。通过模拟不同场景下的车辆行为,评估了系统对于避撞和跟车功能的有效性和稳定性。本文的仿真实验使用了Carsim 2016版本,并提供了相关资料供读者参考。
- 结论
本文基于模型预测控制和最优控制理论,设计并实现了一套基于Carsim和Matlab Simulink的汽车主动安全系统。实验结果表明,该系统在提供车
【相关代码,程序地址】:http://fansik.cn/727221370145.html
















 468
468

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









