






一阶一级倒立摆仿真直线倒立摆MATLAB仿真simulink/simscape 位置角度双环pid控制
ID:4529674479041743
爱小马的海盐大傻
一阶一级倒立摆是一种常见的控制系统的仿真模型,它在工程领域中被广泛应用。在本文中,我们将基于MATLAB的Simulink和Simscape工具,利用位置角度双环PID控制器,来进行一阶一级倒立摆的仿真研究。
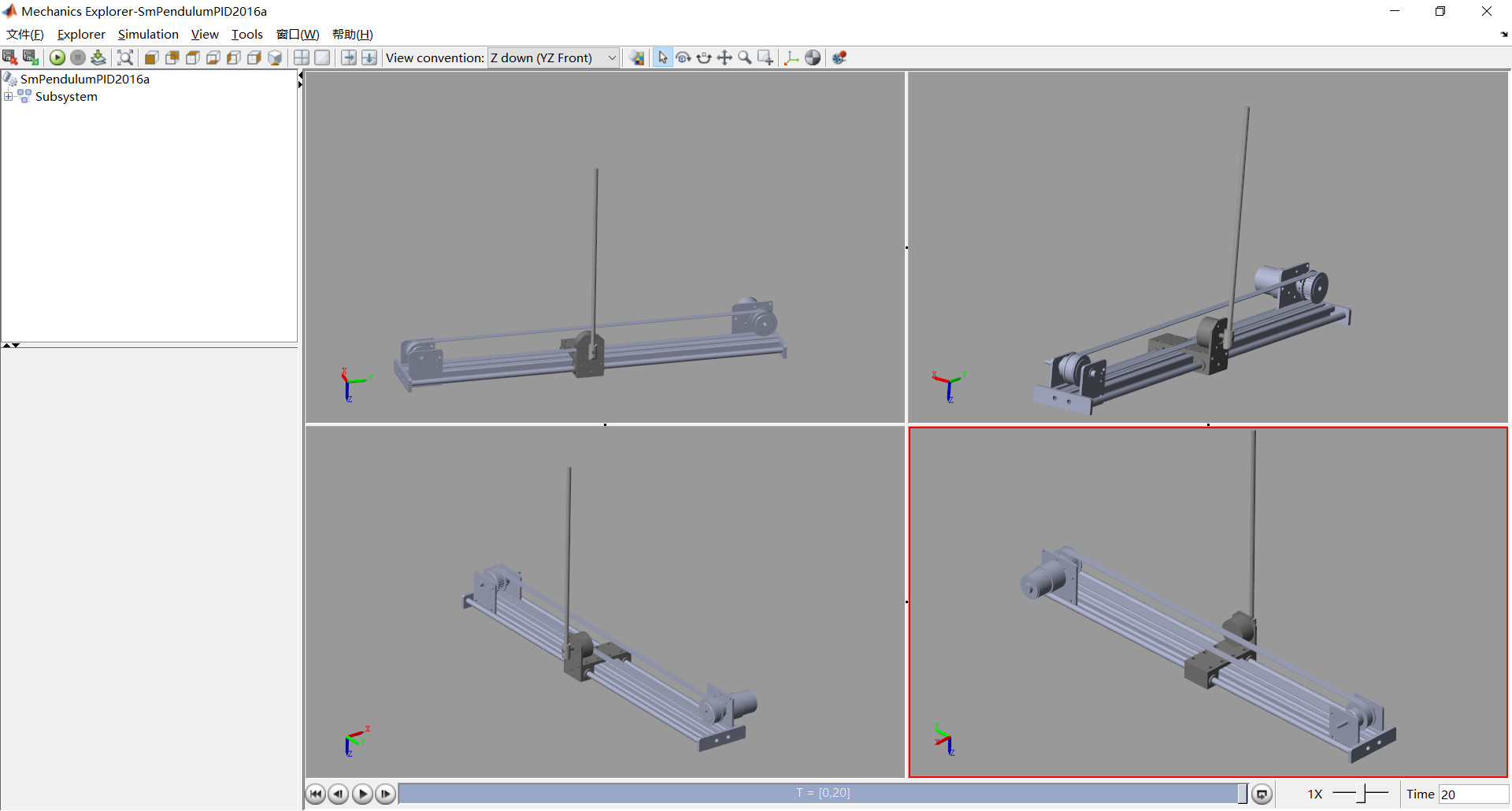
首先,让我们对一阶一级倒立摆的基本原理进行一些简要介绍。一阶一级倒立摆由一个直立的主杆和一个悬挂在主杆上的摆杆组成。主杆的下端通过一个铰链连接到水平地面上,摆杆的下端则通过另一个铰链连接到主杆的顶端。一阶一级倒立摆的目标是通过控制系统来实现摆杆在竖直位置上的平衡。
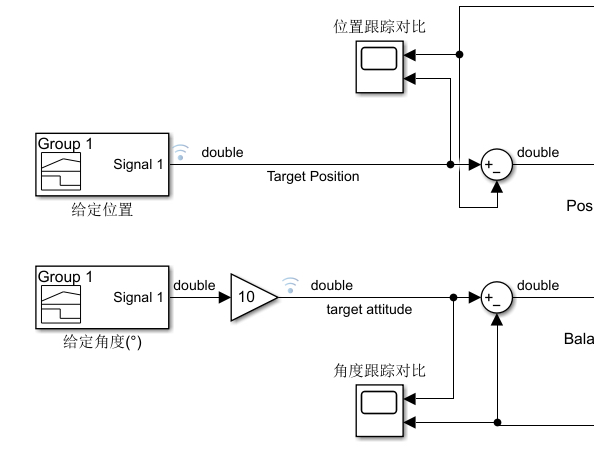
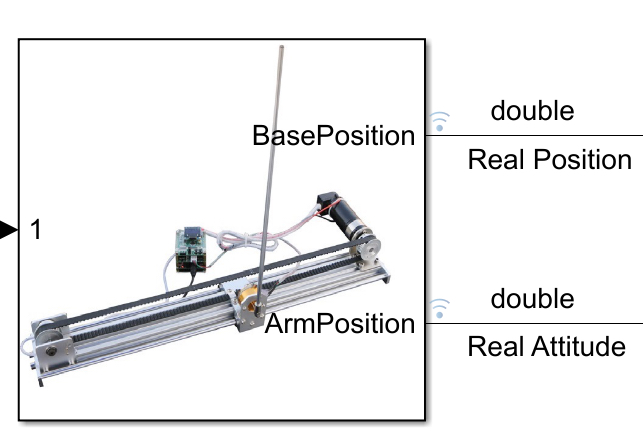
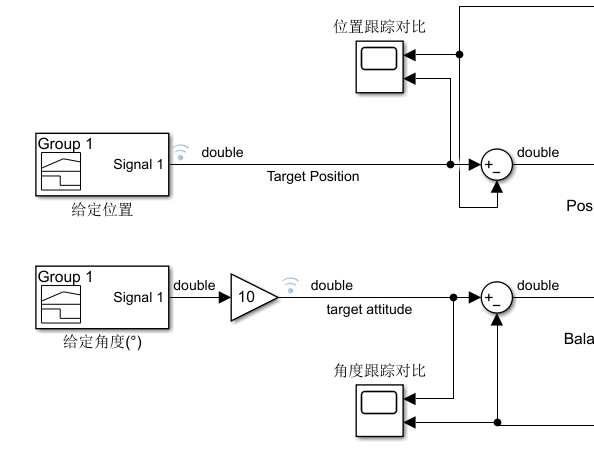
在仿真过程中,我们使用Simulink来建立一阶一级倒立摆的数学模型。首先,我们将主杆的角度和摆杆的位置作为系统的输入量,并采用PID控制器来控制系统的输出量,即摆杆的角度。PID控制器是一种常见的控制器,由比例、积分和微分三个部分组成,可以根据系统的响应特性进行调节。
为了实现一阶一级倒立摆的仿真,我们还需要使用Simscape工具箱来建立摆杆和主杆的物理模型。Simscape是MATLAB中的一种物理建模和仿真工具,它可以将系统的物理特性考虑在内,并提供更加真实的仿真结果。
在建立好系统的模型后,我们可以对一阶一级倒立摆的控制性能进行仿真和分析。我们可以通过调节PID控制器的参数,例如比例增益、积分时间和微分时间,来优化控制系统的性能。同时,我们还可以研究不同工作条件下的系统响应,并探索控制系统的鲁棒性和稳定性。
总之,利用MATLAB的Simulink和Simscape工具,结合位置角度双环PID控制器,我们可以对一阶一级倒立摆进行全面的仿真研究。这种仿真方法不仅可以帮助工程师们更好地理解控制系统的原理,还可以为实际系统的设计和优化提供参考。通过不断调节和优化控制器的参数,我们可以提高系统的稳定性、鲁棒性和响应速度,从而实现更为精确的控制效果。
在实际应用中,一阶一级倒立摆的仿真技术还可以应用于机器人控制、自动驾驶系统、飞行器稳定控制等领域。通过对这些系统的仿真研究,我们可以为实际应用中的控制算法设计和系统优化提供有益的参考和指导。
综上所述,一阶一级倒立摆仿真技术在控制系统领域具有重要的应用价值。通过利用MATLAB的Simulink和Simscape工具,结合位置角度双环PID控制器,我们可以对一阶一级倒立摆进行全面的仿真研究,并为实际系统的设计和优化提供参考。这种仿真方法不仅可以帮助工程师们更好地理解控制系统的原理,还可以应用于机器人控制、自动驾驶系统、飞行器稳定控制等领域,为实际应用中的控制算法设计和系统优化提供有益的指导。
相关的代码,程序地址如下:http://matup.cn/674479041743.html
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









