






基于matlab simulink联合vrep仿真,pid控制保持车距,根据视觉识别自动避障(人、障碍物)。
ID:27225674473782886
D__R
标题:基于MATLAB Simulink联合V-REP仿真的PID控制车辆自动避障系统
摘要:本文基于MATLAB Simulink联合V-REP仿真平台,设计并实现了一种PID控制车辆自动避障系统。该系统利用视觉识别技术,实现了对人和障碍物的自动避障功能。本文将详细介绍系统的设计思路、仿真实验环境搭建及具体实现方法,并对系统的性能进行评估。
-
引言
近年来,自动驾驶技术飞速发展,成为了汽车行业的热门研究方向之一。自动驾驶技术的核心是对车辆周围环境的感知和决策能力,其中自动避障是一个关键的技术挑战。本文将结合MATLAB Simulink和V-REP仿真平台,设计并实现一种基于PID控制的车辆自动避障系统,通过视觉识别技术实现对人和障碍物的自动避障。 -
系统设计
2.1 模型建立
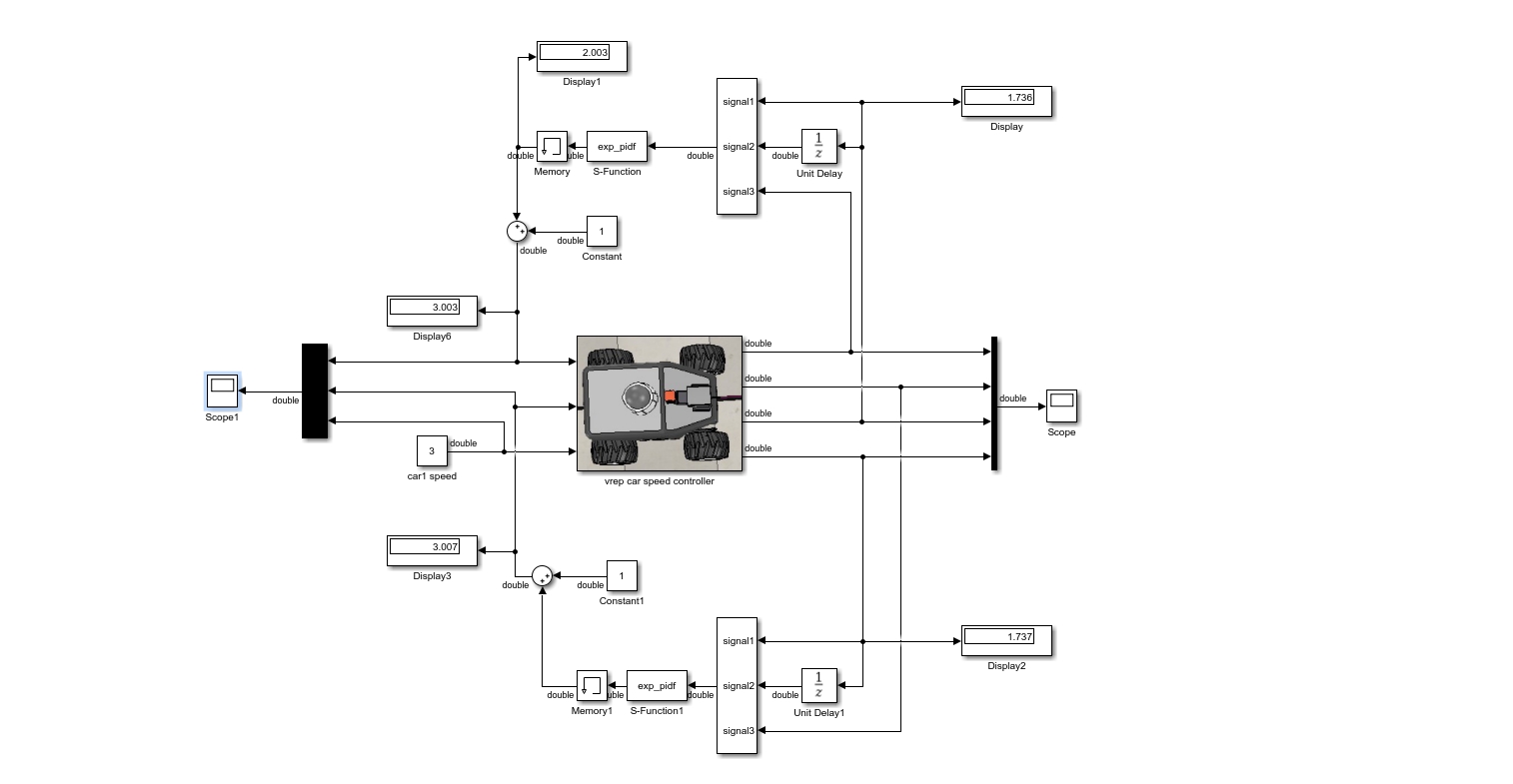
首先,我们在MATLAB Simulink中建立了车辆的动力学模型,考虑了车辆的质量、惯性、转向角等因素,以及车辆的PID控制器模型。然后,我们将建立的模型与V-REP仿真平台进行联合仿真,实现系统的真实运行。
2.2 视觉识别
为了实现车辆的自动避障功能,我们使用了视觉识别技术。通过摄像头获取实时图像,并利用计算机视觉算法对图像进行处理,实现对人和障碍物的识别。我们选择了基于深度学习的目标检测算法,通过训练识别模型对人和障碍物进行分类和定位。
- 系统实现
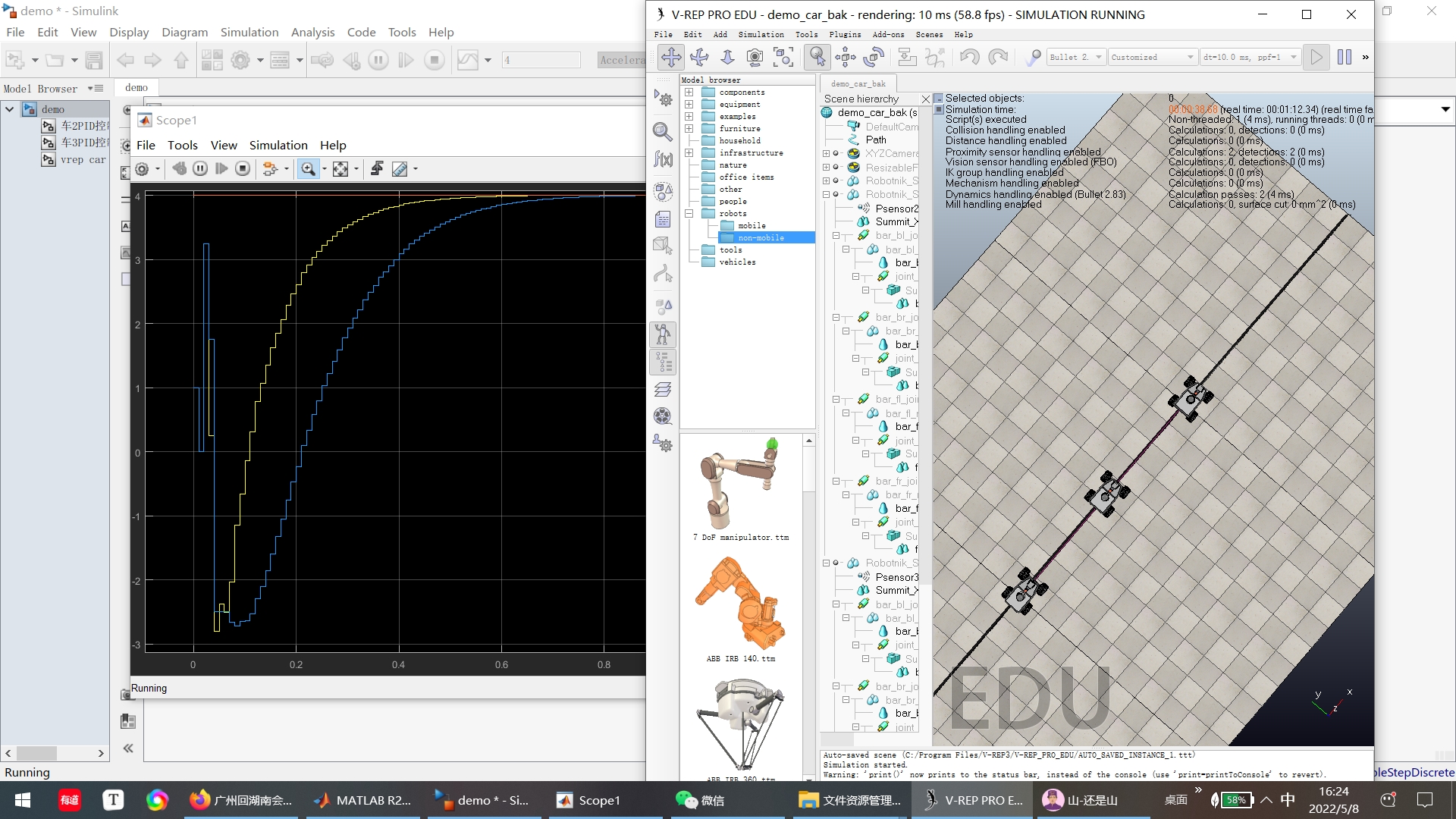
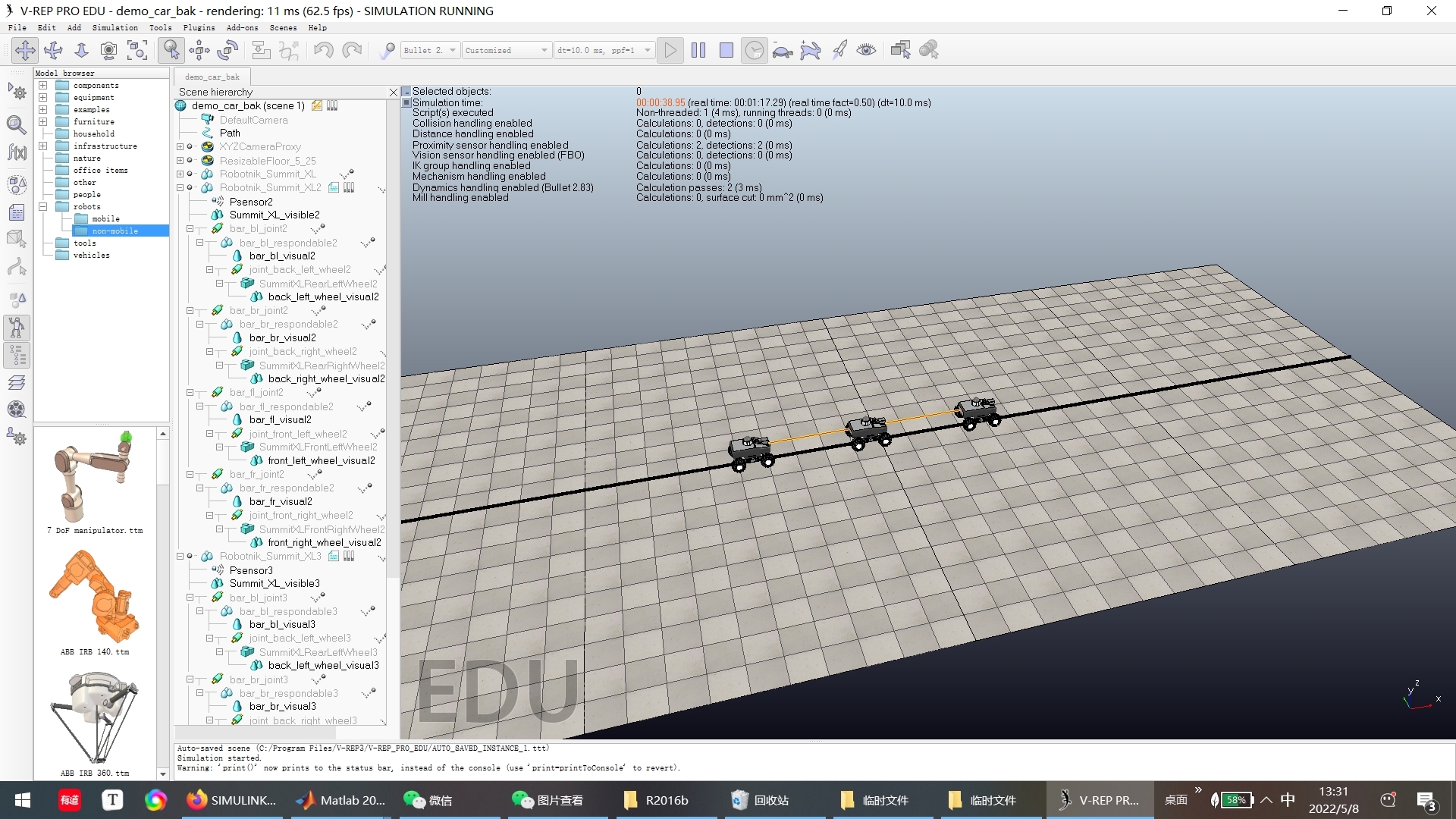
3.1 仿真环境搭建
我们在V-REP仿真平台中搭建了一个包含车辆、摄像头和障碍物的场景。通过添加传感器和控制器,实现车辆的运动控制和视觉感知。同时,通过设置合适的参数,对系统进行仿真实验。
3.2 PID控制保持车距
为了实现车辆的自动避障和保持车距功能,我们设计了PID控制器。PID控制器根据摄像头识别到的人和障碍物的位置和距离信息,调整车辆的速度和转向角,实现对车距的自动控制。
3.3 根据视觉识别自动避障
当摄像头识别到人和障碍物时,系统将根据其位置信息和车辆当前状态,进行自动避障的决策。通过PID控制器调整车辆的运动,避免与人和障碍物发生碰撞,保证行车安全。
-
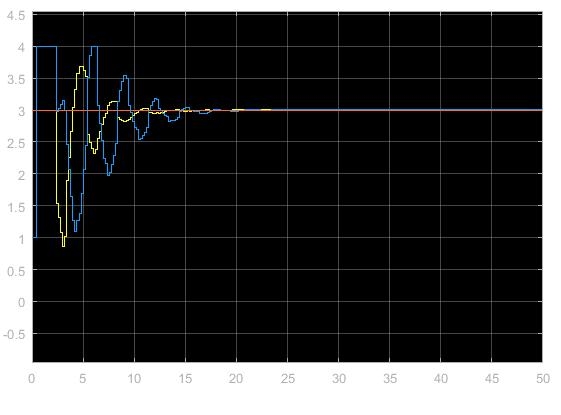
实验结果与分析
我们在V-REP仿真平台上进行了一系列实验,评估了系统的性能。实验结果表明,该系统能够准确识别人和障碍物,并实现对车距的自动控制和避障功能。系统在不同场景下表现良好,具有较高的稳定性和可靠性。 -
结论
本文基于MATLAB Simulink联合V-REP仿真平台,设计并实现了一种基于PID控制的车辆自动避障系统。该系统利用视觉识别技术实现了对人和障碍物的自动识别和避障功能。实验结果表明,该系统具有较高的性能和可靠性,为车辆自动驾驶技术的研究和应用提供了参考。
关键词:MATLAB Simulink,V-REP仿真,PID控制,自动避障,视觉识别
相关的代码,程序地址如下:http://matup.cn/674473782886.html
















 1642
1642











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









