






抽象
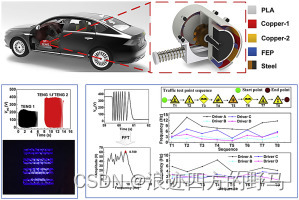
交通安全一直是社会关注的问题,驾驶员的习惯直接影响着交通安全。因此,监控驾驶员习惯非常重要。踏板是驾驶过程中的核心操作装置,因此越来越重视驾驶员的步进运动。摩擦电纳米发电机(TENG)在收集随机触发运动的能量和反映随机触发运动的特性方面表现良好。这报道了一种新型的扫掠式摩擦电纳米发电机(ST-TENG),它由一个推杆,壳体,两个飞轮和一个飞轮组成。ST-TENG可以收集随机触发运动的能量并监控驾驶员的习惯。实验表明,ST-TENG可以产生400 V的开路电压和15 μA的短路电流,发现ST-TENG数据可以用于反映路况和驾驶员习惯。而ST-TENG有潜力普及智能驾驶系统。
图形摘要
关键字
摩擦电纳米发电机
单飞轮
随机触发运动
采集机械能
驾驶员习惯监控
1. 引言
近年来,随着汽车保有量的逐步增加,交通事故造成的死亡人数飙升。每年约有450万人死于交通事故,约6.5亿人在交通事故中受伤或致残[1]。不良的驾驶员习惯和冲动驾驶是交通事故的主要原因[2],[3],[4],[5],[6]],踏板是驾驶过程中的重要组成部分。驾驶员踩踏板产生的信号可以反映驾驶习惯[7]。由于路况的随机性,踏板运动是随机触发的,因此监控设备需要能够响应随机触发运动。目前有许多设备可以监控随机触发运动特性[8]。
TENGs最初是由王的团队在2012年提出的[9,10],并日益受到全世界的关注。基于摩擦电和静电感应耦合原理的TENGs将机械能转换为电能并产生特征信号[[11],[12],[13],[14],[15]]。 TENGs的特点是成本低,制造简单。TENGs从环境中收集不同类型的机械能,如振动[16,17],人体运动[18,19],风[20,21],雨滴[22]和水流[23]。TENGs甚至可以通过将多个单元连接到网络来收集大规模的蓝色能量[24,25]。此外,TENG还可以用作传感器[[26],[27],[28],[29]]。特别是,TENG可以响应随机运动特性[30,31],特别是在汽车领域[32,33]。Stee环形轮和踏板是驾驶过程中的重要操作部件,可以监控驾驶员的习惯。
本文设计了一种新型扫掠式摩擦电纳米发电机(ST-TENG),可以收集随机触发运动的能量并监测驾驶员的习惯。ST-TENG主要包括一个推杆,炮弹,两个飞轮和一个飞轮。在单飞轮单向传动和飞轮储能的基础上,ST-TENG可以将随机触发运动转化为连续的旋转运动。当随机触发运动施加到推杆上时,推杆和单飞轮将触发运动转化为轴的旋转运动。飞轮由旋转轴驱动以储存能量,并且可以连续旋转。摩擦电材料布置在飞轮周围,飞轮可以相对于外壳上的电极滑动,因此电极根据摩擦电热化和静电感应的耦合原理产生电能。测试了ST-TENG在不同设置下的性能。在ST-TENG性能测试中,ST-TENG在单个触发器下的最大运行时间为6秒。在最佳参数下,ST-TENG可产生400 V的开路电压和15 μA的短路电流。每个发电机组(TENG 1)可产生1.7 mJ的电能输出。ST-TENG通过整流器轻松点亮500多个发光二极管(LED)。通过并联整流器和商用电容器,ST-TENG可以操作商用温度计。ST-TENG还监控驾驶员的习惯,并可能分析路况。ST-TENG对于微能量捕获和传感以及驾驶员习惯的监控、智能驾驶和交通安全至关重要。通过与机器学习和车载智能驾驶系统合作,将实时数据传输到手机,每个驾驶员的数据可用于未来的联网车辆[34]。
2. 结果和讨论
2.1. 结构设计及工作原理
图1b显示了一种新型扫描型摩擦电纳米发电机(ST-TENG),如图1a所示,显示了能量产生部分(TENG 1)的细节,该部分包括柔性氟化乙烯丙烯(FEP)薄膜(图1c)和铜电极。图1d显示了组装的ST-TENG,尺寸为125毫米(长)×95毫米(宽)×95毫米(高)。ST-TENG由四部分 组成,即推杆、壳体、两个飞轮和一个飞轮,如图1e所示。
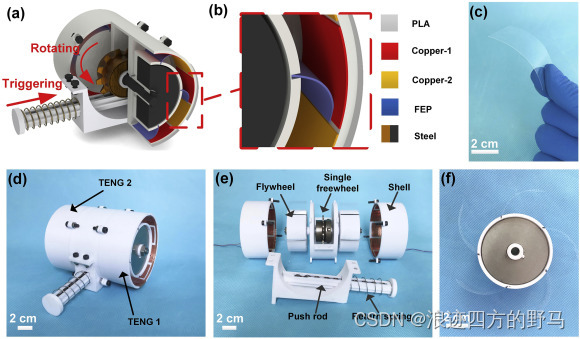
图 1.新型扫描式摩擦电纳米发电机(ST-TENG)的结构设计:(a)ST-TENG的示意图,(b)发电部分的放大图像(TENG 1),(c)作为摩擦材料的柔性FEP薄膜,(d)组装照片,(e)ST-TENG的组件和(f)飞轮(比例尺:2厘米)。
推杆插入外壳中,并接收随机触发运动。随机触发运动通过推杆和单个飞轮转换为连续旋转运动。五块宽度为 30 mm 的柔性 FEP 薄膜均匀地放置在飞轮的外壁上。十个宽25毫米,长30毫米的铜电极均匀分布在外壳的内壁上。这种设计确保了最大的空间利用率,并且柔性FEP薄膜不会相互干扰。每个柔性FEP薄膜的一端插入飞轮,另一端与外壳内壁上的铜电极接触。因此,柔性FEP薄膜能够随飞轮旋转并滑向铜电极以产生电力。当随机触发运动消失时,推杆利用复位弹簧的恢复力返回到其初始位置。单个飞轮不会在推杆的回流中传递力。为了收集更多的能量,可以在飞轮上添加44g的质量板,改变飞轮的质量以改善能量存储。本文稍后将详细介绍实验测试。推杆由随机运动触发,因此ST-TENG重复上述过程以从运动中收集能量。
图2a显示了ST-TENG的工作原理。如前所述,柔性FEP膜与外壳内壁上的铜电极接触。如图2a i所示,当飞轮处于初始位置时,柔性FEP膜与铜-1完全对齐。在摩擦电效应下,电子从铜-1转移到柔性FEP膜,因为柔性FEP膜的电负性大于摩擦电系列中铜的电负性[35]。同时,铜-1具有相同的正电荷。在这种状态下,正负电荷相等,由于正负电荷相等,在铜-1和铜-2之间的外部电路中不产生电流。随着飞轮的旋转,柔性FEP薄膜开始相对于铜-1滑动,并逐渐与铜-2接触。根据静电感应原理,电位差驱动正电荷从铜-1到铜-2,如图2a ii所示。直到柔性FEP膜与铜-2完全重叠,所有正电荷都转移到铜-2上,如图2a iii所示。飞轮保持旋转,当柔性FEP膜再次与铜-1接触时,正电荷从铜-2流向铜-1,如图2a iv所示。然后,柔性FEP薄膜再次与铜-1重叠,如图2a i所示。在这个循环中,交流电在电路中产生。因此,ST-TENG接收到随机触发运动,飞轮继续旋转,导致外部电路之间产生交流电。
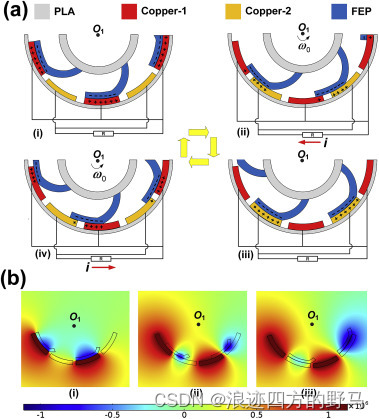
图 2.ST-TENG的工作原理:(a)ST-TENG工作原理示意图和(b)ST-TENG在三种状态下的模拟。
为了证明这种结构的可行性,使用 COMSOL 软件模拟了两个相邻电极之间的电位分布(图 2b)。电位轮廓清楚地表明了两类电极之间的电位差,从而带动了在外部电路中流动的电流。
2.2. 性能
灵活的FEP薄膜参数和飞轮质量会影响ST-TENG输出[36]。图中研究了ST-TENG捕获随机触发的运动的能力以及如何实现更大的能量输出。S1、S2、S3、S4 和 S5。这得到了ST-TENG最佳能量输出的参数,飞轮质量为1.326 kg,柔性FEP膜的角度为60°,柔性FEP膜的长度为55 mm。 柔性 FEP 薄膜的角度为 60°,柔性 FEP 薄膜的长度为 55 mm。
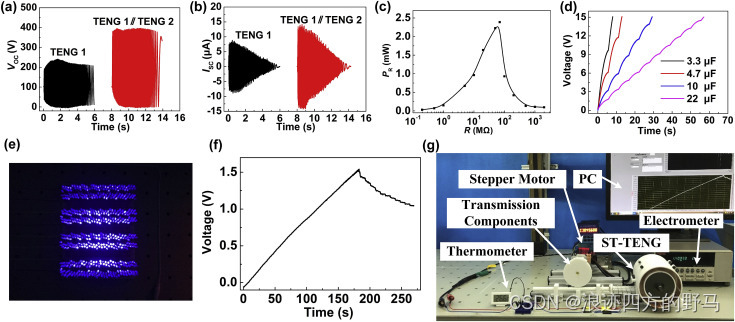
图 3.开路电压(a)和短路电流(b)并联,TENG 1和TENG 2并联。(c) ST-TENG在不同负载下的瞬时功率。(d) 不同类型电容器的充电时间,范围为0至15 V.(e) 并联点亮500个LED。(f) 为小型商用温度计供电的电压曲线。(g) 通过ST-TENG实验系统为温度计供电。
图3a和b显示,并联放置的TENG 1和TENG 2的性能是TENG 1的1.6倍。当飞轮的速度从快到快时,柔性薄膜上的离心力从大到小变化,导致电极与柔性薄膜之间的接触状态略有变化,电压略有波动。图 3c–g 显示了并联放置的 TENG 1 和 TENG 2 的结果。图3c显示,当负载为70 MΩ时,ST-TENG具有最高的输出功率(2.4 mW)。图3d显示了不同电容器在0至15 V充电所需的时间,图3e显示,对于1.2 m/s的触发速度,单个触发可以点亮500个LED持续6秒(详细信息在支持电影S1中提供)。 图3f,步进电机每3.5秒触发一次,当电容电压达到1.5 V时,打开温湿度传感器,最后使其稳定工作。 图3g展示了通过ST-TENG实验系统为温度计供电(详细信息在支持电影S2中介绍)。
以下是与本文相关的补充数据:下载 : 下载视频 (24MB)
多媒体组件 2.
多媒体组件 3.
3. 驾驶员习惯监控
扫掠式摩擦电纳米发电机(ST-TENG)可以有效反映触发运动特性。本研究采用图4所示的手动齿轮驱动模拟器,详情见支持影片S3。图4a显示了ST-TENG的仿真安装。图4b i显示了驱动器在运行过程中的实验系统。图4b ii显示了安装在汽车踏板下的ST-TENG。ST-TENG的参数是飞轮质量为1.326 kg,柔性FEP膜的角度为60°,柔性FEP膜的长度为55 mm。驾驶员习惯(图4c i)和路况(图4c ii)可以通过分析原始信号来反映。
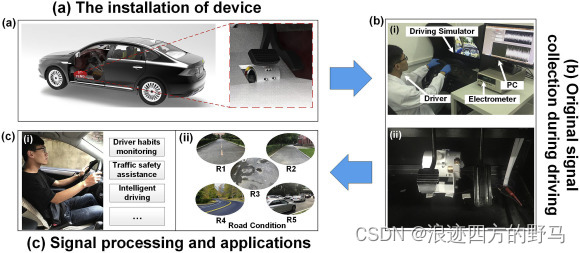
图 4.监控驾驶员习惯:(a) ST-TENG的模拟安装;(二)实验系统;(三)应用领域和路况。
以下是与本文相关的补充数据:下载 : 下载视频 (37MB)
多媒体组件 4.
图5显示了处理ST-TENG输出信号的步骤。这里以驾驶员A为例,随后进行了详细的研究。驾驶员A的原始信号如图5a所示,图5b显示了驾驶员A在不同路况下行驶时踩油门和刹车踏板的次数。触发后,由于摩擦阻力,飞轮的速度逐渐降低。相应的特性频率可以通过时域信号的快速傅里叶变换(FFT)获得。从速度与特性频率的相应关系可以得出结论,当驾驶员第一次踩下踏板时,飞轮具有最高的速度和特性频率。其中,使用最高特性频率来检测驾驶员的习惯是合适的。特性频率与触发速度的对应关系如图1所示为支持公式方程S(7)和图。S6.图5d显示了通过FFT变换获得的原始时域信号的频域信号(图5c)。最后一个峰值的横坐标对应于时域信号的最高频率。
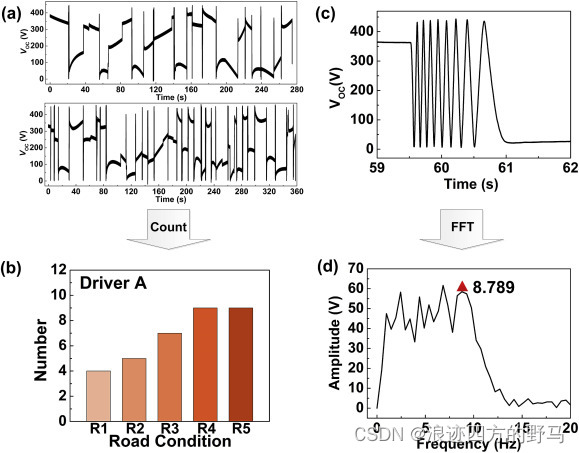
图 5.监控驾驶员习惯:(a)驾驶员A的原始信号;(b) 司机A在不同路况下驾驶时踩油门和刹车踏板的次数;(c) 驱动器A的电压信号;和(d)频域信号。
测试了ST-TENG在监控驾驶习惯方面的可靠性。选择的四名自愿驾驶员是合法和安全驾驶的(图6a,d,g,j)用于实验研究,如图6所示。记录了四名驾驶员在同一条道路上的油门踏板信号(图6b,e,h,k)。它表明每个驾驶员的总驾驶时间和步速不同(图6c,f,i,l)。每个驾驶员的步进信号和步进速度都不同。它可以分析,驾驶员A踩油门踏板的速度更快,驾驶员B和D踩油门踏板的速度更慢,驾驶员C和D踩油门踏板的次数比司机A和B少。这些信息对于监控驾驶员习惯很有价值。
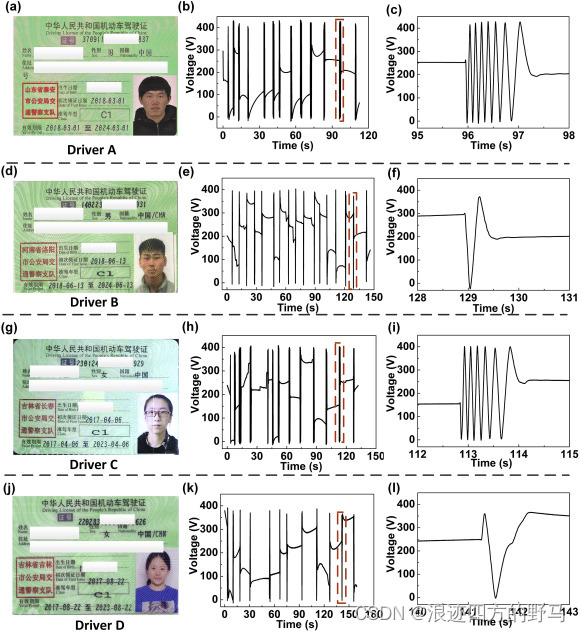
图 6.驾驶模拟:(a–c)、(d–f)、(g–i) 和 (j–l) 驾驶执照、油门踏板数据和四位驾驶员的信号放大。
调查了不同路况下的驾驶员习惯。设置不同的路况,让四名驾驶员从起点开车到终点,如图7a所示。从低(浅红色)复杂性到高(深红色)复杂性有五个部分。图7b和c显示了四名驾驶员在五路条件下踩下制动踏板和油门踏板的时间。不同的驾驶员显然有不同的驾驶习惯。驾驶员A和B在交通繁忙时更喜欢用油门而不是刹车来控制速度;在相对低复杂度的道路条件下,驾驶员A、B和D更喜欢使用油门来控制车速。总体而言,随着路况变得越来越复杂,图7d中四名驾驶员踩下油门和刹车的次数呈现上升趋势,上述数据分析可能反映了路况。长期的数据收集可以预测交通事故的风险,为人工智能驾驶领域做出重要贡献。三位作者(Driver E,F和G)也参与了文本,细节在图中呈现。S6、S7 和 S8。
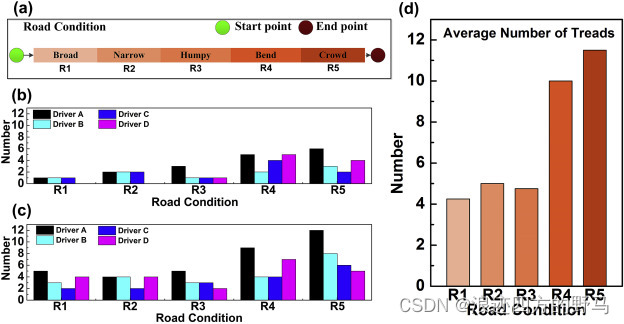
图 7.记录司机踩踏板的次数:(a)设定路况,(b)四名司机在不同路况下踩刹车的次数,(c)四名司机在不同路况下踩油门的次数,以及(d)四名司机在不同路况下踩踏板的平均次数。
道路序列设置如图 8a 所示。沿路设置了八个交通警告标志,以指示人行横道,交通信号灯,减速带,学校,十字路口,减速带,人行横道和交通信号灯。沿着这条路线,四个司机驾驶一辆汽车从起点到终点。实验的目的是研究同一条道路上不同驾驶员踩刹车和油门的速度。图8b和c分别显示了不同驾驶员踩下制动踏板和油门踏板的信号频率。图8d和e分别显示了四名驾驶员踩下制动踏板和油门踏板的平均速度。当红绿灯红着时,四名司机踩刹车踏板的速度更快。平均步速表示驾驶的稳定性,也可能反映驾驶员的个性。快速踩踏板的驾驶员可能不耐烦,而缓慢踩踏板的驾驶员可能具有较温和的天性。交通事故的风险可以通过长期数据收集来预测。

图 8.(a) 实验中的道路顺序。(b) 踩下刹车踏板的驾驶员的信号频率。(c) 驾驶员踩油门踏板的信号频率。(d) 四名司机踩下刹车踏板的平均速度。(e) 四名司机踩油门踏板的平均速度。
4. 结论
设计了一种新型扫掠式摩擦电纳米发电机(ST-TENG),利用单个飞轮来收集随机触发运动能量,用于监测驾驶员的习惯。ST-TENG的最大开路电压为400 V,最大短路电流为15 μA。因此,ST-TENG可以通过 并联商用电容器和整流器为500个LED和商用温度传感器供电。最重要的是,它还可以监控驾驶习惯,在数据处理后分析路况,并在驾驶过程中记录数据。通过FFT变换,我们可以分析驾驶员的步进信号,发现不同的驾驶员有不同的驾驶习惯。这是人工智能驾驶和安全驾驶领域的一项重要突破。ST-TENG将有利于人工智能驾驶的普及。未来,通过与机器学习和车载智能驾驶系统合作,将实时数据传输到手机,每个驾驶员的数据可用于联网车辆。
5. 实验部分
5.1. 新登的制造
扫描式摩擦电纳米发电机(ST-TENG)的尺寸为125毫米(长)×95毫米(宽)×95毫米(高)。推杆的外壳,飞轮和导轨是通过3D打印制成的,打印材料是聚乳酸(PLA)。单飞轮是市售自行车的飞轮。 ST-TENG的旋转轴由车床加工。钢板的质量为44克,直径为63毫米,厚度为1.5毫米。柔性 FEP 薄膜的厚度为 100 μm,宽度为 30 mm。10个厚度为100μm,宽度为25mm,长度为30mm的铜电极均匀分布在外壳的内壁上。其他信息作为支持信息提供。
5.2. 电气测量
触发由步进电机(J-5718HBS401,中国益生)产生,ST-TENG的信号由可编程静电计(6514,美国吉时利)和数据采集系统(PCI-6259,美国国家仪器)捕获。信号 被 传送 到 计算机 并由 LabVIEW 记录。驾驶模拟器已准备好进行测试(思源SY-MNQ1)。
















 5229
5229











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}