






线性时不变状态空间方程:
dx[t]/dt=Ax[t]+Bu[t]
y[t]=Cx[t]+Du[t]
零阶保持器离散公式:
x[k+1]=Fx[k]+Gu[k]
y[k+!]=Cx[k]+Du[k]
其中:
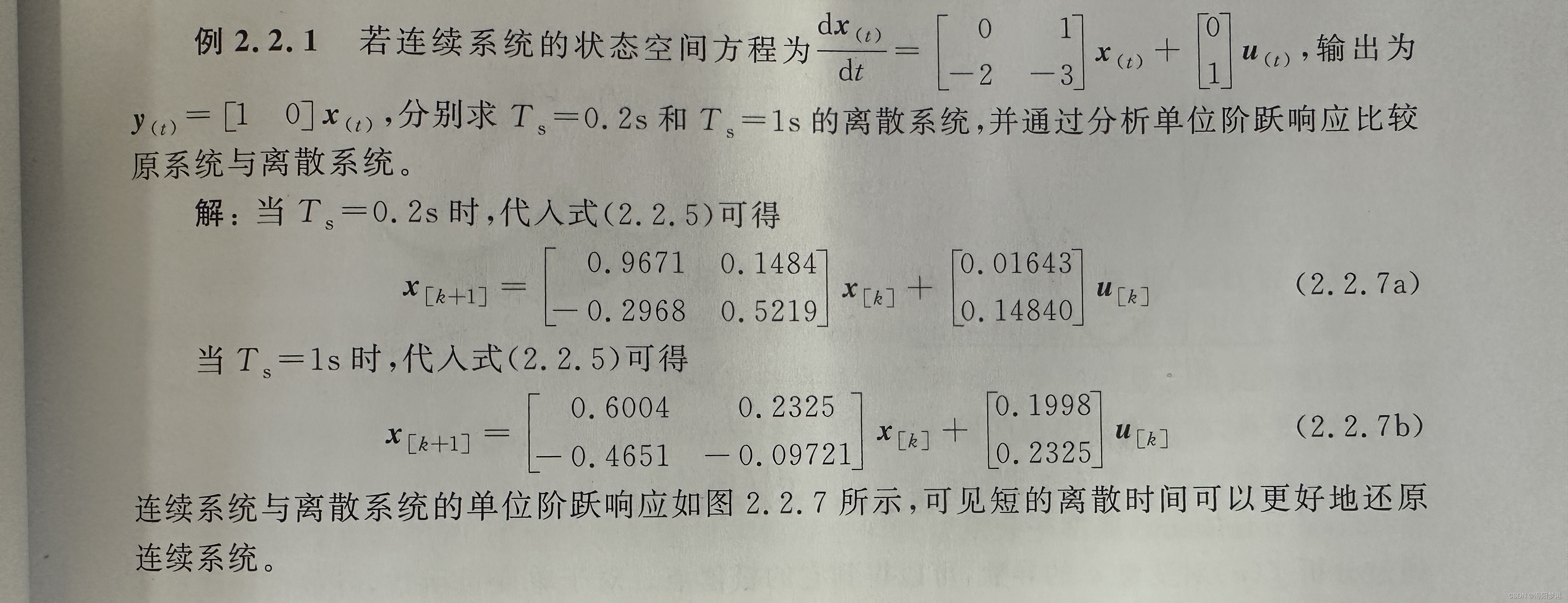
F=e^(ATs)
G=A^(-1)(F-I)
问题:来自控制之美2
matlab:
A=[0 1;-2 -3];
B=[0;1];
C=[1 0];
D=0;
I=[1 0;0 1];
T=0.2;
[F,G,C1,D1]=c2dm(A,B,C,D,T,'zoh');线性时不变状态空间方程:
dx[t]/dt=Ax[t]+Bu[t]
y[t]=Cx[t]+Du[t]
零阶保持器离散公式:
x[k+1]=Fx[k]+Gu[k]
y[k+!]=Cx[k]+Du[k]
其中:
F=e^(ATs)
G=A^(-1)(F-I)
问题:来自控制之美2
matlab:
A=[0 1;-2 -3];
B=[0;1];
C=[1 0];
D=0;
I=[1 0;0 1];
T=0.2;
[F,G,C1,D1]=c2dm(A,B,C,D,T,'zoh');
 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





















 926
926





