







基于气象模式、气象观测数据的深度学习预报方法总结
项目介绍
这次任务的主要目的是利用历史观测数据和气象模式的预报数据来预报未来24小时的降水。这个问题的难度其实还是挺大的, 在预报时长上算是中短期气象预报。如果没有气象模式的预报结果,那这个任务其实是短时气象预报的核心任务。数千名科学家都曾想方设法研究,称其为973项目都不为过。不过这次有了气象模式的帮助,算是站在巨人肩膀上工作。气象模式发端与1922年理查森开始利用流体运动方程预报天气运动。自1946年冯诺依曼制造第一台计算机后,数值气象预报变成可能。近年来数值气象预报在气象业务中扮演着顶梁柱的决策,成为气象预报不可或缺的判断依据。
这个任务可以简化为一下建模内容:
观测数据 G [histime, feature1, width, height](t(-24)–>t(-1))
气象模式数据 M [pretime, feature2, width, height] (t(0)-t(24))
目标 降水场 P [pretime, 1, width, height] (t(0)-t(24))
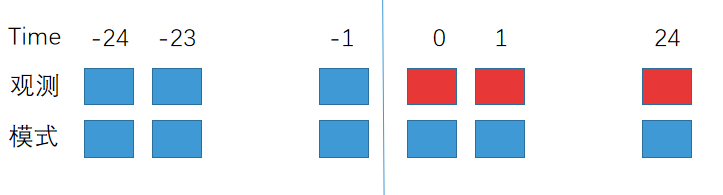
红色区域就是模型的输出,其他时次都是已知资料。
1.只基于观测数据
本着模型由简入难的思想,首先测试的是只用观测数据,上一个时次或上几个时次的观测变量作为特征去预报未来几个时次。做了两种模型,一种把像素点看成是孤立的点,不考虑周边的像素。然后用一些机器学习算法(随机森林,lightGBM)去做一个晴雨或降水的预测。一种是用卷积的R
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 537
537

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









