







 本文详细介绍了使用D2Q9模型的格子Boltzmann方法在圆柱绕流模拟中的应用,包括LBM的基本原理、D2Q9模型的实现以及其在数值模拟中的效果。作者还探讨了LBM在这一领域的优势和未来应用前景。
本文详细介绍了使用D2Q9模型的格子Boltzmann方法在圆柱绕流模拟中的应用,包括LBM的基本原理、D2Q9模型的实现以及其在数值模拟中的效果。作者还探讨了LBM在这一领域的优势和未来应用前景。
✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
🔥 内容介绍
本文介绍了使用 D2Q9 模型的格子 Boltzmann 方法 (LBM) 模拟圆柱绕流。LBM 是一种基于粒子动力学的计算流体动力学方法,它可以有效地模拟复杂流动现象。D2Q9 模型是一种常见的 LBM 模型,它具有九个离散速度方向。本文首先介绍了 LBM 的基本原理和 D2Q9 模型的具体实现。然后,本文展示了使用 D2Q9 模型模拟圆柱绕流的数值结果。最后,本文总结了模拟结果并讨论了 LBM 在模拟圆柱绕流中的应用前景。
引言
圆柱绕流是一种常见的流动现象,它广泛存在于工程和自然界中。圆柱绕流的特性对许多工程应用至关重要,例如风力涡轮机、桥梁和建筑物的流体力学设计。传统的计算流体动力学 (CFD) 方法,如有限体积法和有限元法,可以用来模拟圆柱绕流。然而,这些方法通常需要大量的计算资源,并且对于复杂几何形状的流动模拟存在困难。
LBM 是一种基于粒子动力学的 CFD 方法,它可以有效地模拟复杂流动现象。LBM 的基本原理是将流体视为由大量粒子组成的。这些粒子在离散的格子空间中移动,并且相互碰撞。粒子的碰撞遵循特定的规则,这些规则由 LBM 模型定义。D2Q9 模型是一种常见的 LBM 模型,它具有九个离散速度方向。D2Q9 模型可以有效地模拟二维不可压缩流动。
LBM 基本原理
LBM 的基本原理是基于玻尔兹曼方程。玻尔兹曼方程描述了流体中粒子的分布函数随时间和空间的变化。LBM 通过求解玻尔兹曼方程的离散形式来模拟流体流动。
D2Q9 模型的玻尔兹曼方程离散形式为:
f_i(x + e_i, t + 1) - f_i(x, t) = - \frac{1}{\tau} (f_i(x, t) - f_i^{eq}(x, t))
f_i^{eq}(x, t) = \omega_i \rho(x, t) [1 + \frac{e_i \cdot u(x, t)}{c_s^2} + \frac{(e_i \cdot u(x, t))^2}{2c_s^4} - \frac{u(x, t) \cdot u(x, t)}{2c_s^2}]
其中:
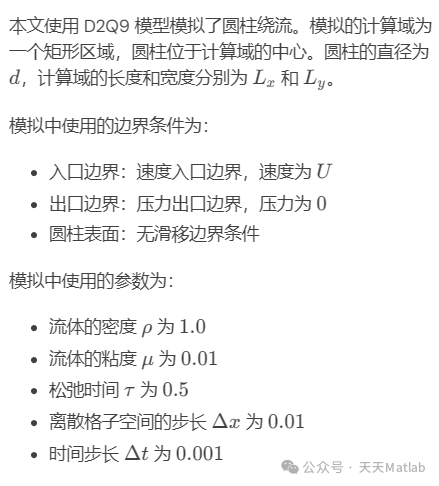
圆柱绕流模拟
📣 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% cylinder.m: Flow around a cyliner, using LBM%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% This program is free software; you can redistribute it and/or% modify it under the terms of the GNU General Public License% as published by the Free Software Foundation; either version 2% of the License, or (at your option) any later version.% This program is distributed in the hope that it will be useful,% but WITHOUT ANY WARRANTY; without even the implied warranty of% MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the% GNU General Public License for more details.% You should have received a copy of the GNU General Public% License along with this program; if not, write to the Free% Software Foundation, Inc., 51 Franklin Street, Fifth Floor,% Boston, MA 02110-1301, USA.%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clear% GENERAL FLOW CONSTANTSlx = 250;ly = 51;obst_x = lx/5+1; % position of the cylinder; (exactobst_y = ly/2+1; % y-symmetry is avoided)obst_r = ly/10+1; % radius of the cylinderuMax = 0.02; % maximum velocity of Poiseuille inflowRe = 100; % Reynolds numbernu = uMax * 2.*obst_r / Re; % kinematic viscosityomega = 1. / (3*nu+1./2.); % relaxation parametermaxT = 400000; % total number of iterationstPlot = 5; % cycles% D2Q9 LATTICE CONSTANTSt = [4/9, 1/9,1/9,1/9,1/9, 1/36,1/36,1/36,1/36];cx = [ 0, 1, 0, -1, 0, 1, -1, -1, 1];cy = [ 0, 0, 1, 0, -1, 1, 1, -1, -1];opp = [ 1, 4, 5, 2, 3, 8, 9, 6, 7];col = [2:(ly-1)];[y,x] = meshgrid(1:ly,1:lx);obst = (x-obst_x).^2 + (y-obst_y).^2 <= obst_r.^2;obst(:,[1,ly]) = 1;bbRegion = find(obst);
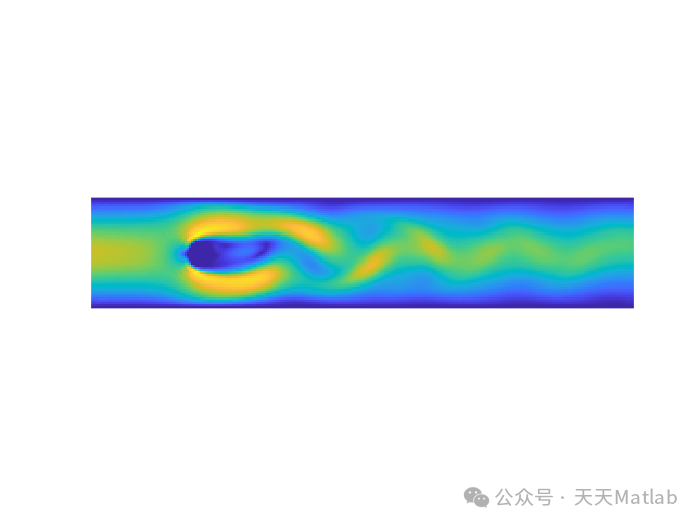
⛳️ 运行结果
🔗 参考文献
[1] 王文全,陈相臻,王志良.基于浸入边界–格子Boltzmann方法模拟动边界绕流问题[J].流体动力学, 2018, 6(3):8.DOI:10.12677/IJFD.2018.63006.
[2] 王龙.圆柱绕流的LBM模拟[J].北京大学学报(自然科学版)(5):647-652[2024-03-02].DOI:10.3321/j.issn:0479-8023.2002.05.009.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类

















 800
800

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









