







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
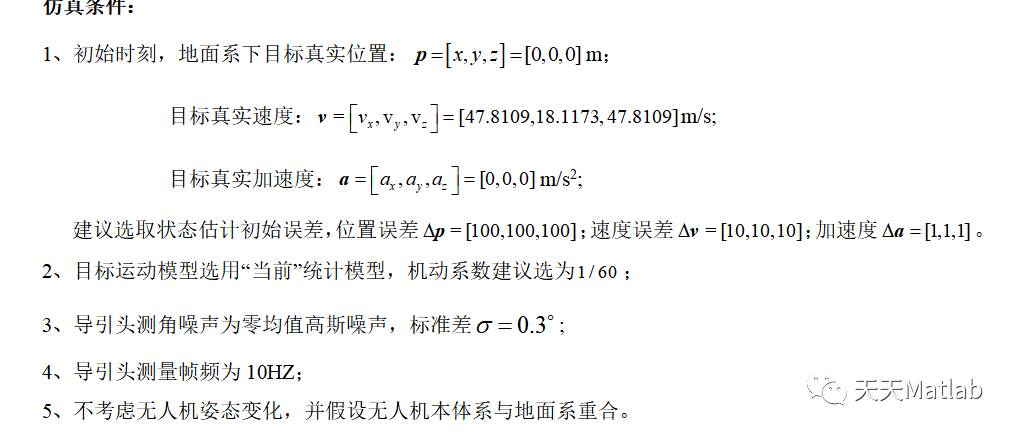
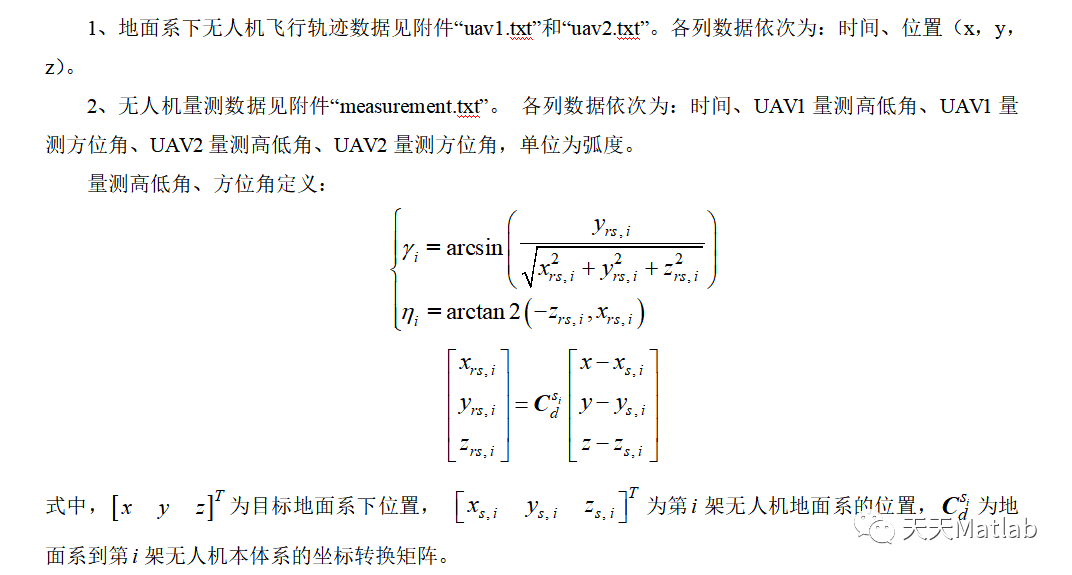
假设有两架无人机对移动目标进行协同定位,每架无人机上安装有被动雷达导引头,可提供高低角及方位角两种量测信息。请根据以下仿真条件,完成基于扩展卡尔曼滤波的协同定位滤波器设计及仿真分析。
⛄ 部分代码
function [out] = cal_H(x,y,z,Xs1,Xs2,Ys1,Ys2,Zs1,Zs2)
Xrs1=x-Xs1;
Xrs2=x-Xs2;
Yrs1=y-Ys1;
Yrs2=y-Ys2;
Zrs1=z-Zs1;
Zrs2=z-Zs2;
S1=norm([Xrs1 Yrs1 Zrs1]);
S2=norm([Xrs2 Yrs2 Zrs2]);
s1=norm([Xrs1 Zrs1]);
s2=norm([Xrs2 Zrs2]);
dh1x=1/sqrt(1-(Yrs1/S1)^2)*(-Xrs1*Yrs1)/S1^3;
dh1y=1/sqrt(1-(Yrs1/S1)^2)*(1/S1+(-Yrs1^2)/S1^3);
dh1z=1/sqrt(1-(Yrs1/S1)^2)*(-Zrs1*Yrs1)/S1^3;
dh2x=Zrs1/s1^2;
dh2y=0;
dh2z=-Xrs1/s1^2;
dh3x=1/sqrt(1-(Yrs2/S2)^2)*(-Xrs2*Yrs2)/S2^3;
dh3y=1/sqrt(1-(Yrs2/S2)^2)*(1/S2+(-Yrs2^2)/S2^3);
dh3z=1/sqrt(1-(Yrs2/S2)^2)*(-Zrs2*Yrs2)/S2^3;
dh4x=Zrs2/s2^2;
dh4y=0;
dh4z=-Xrs2/s2^2;
O=zeros(1,6);
out=[ dh1x dh1y dh1z O;
dh2x dh2y dh2z O;
dh3x dh3y dh3z O;
dh4x dh4y dh4z O];
end
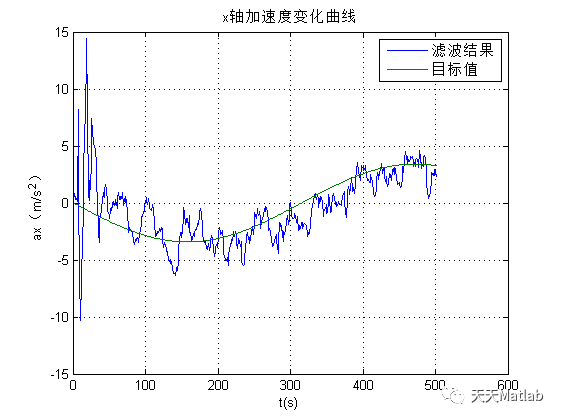
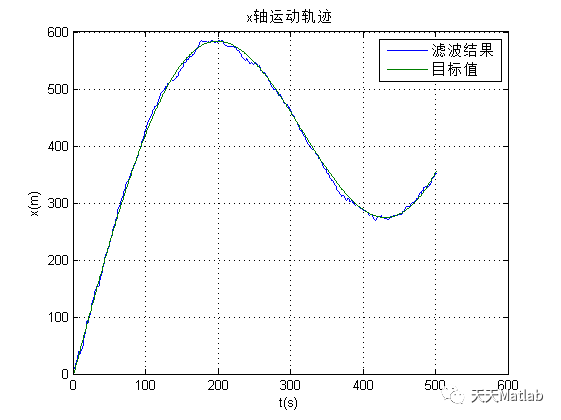
⛄ 运行结果

⛄ 参考文献
[1]冯燕. 基于扩展卡尔曼滤波的目标追踪算法[J]. 电脑知识与技术:学术版, 2022(024):018.
⛄ Matlab代码关注
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 2618
2618











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











