







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
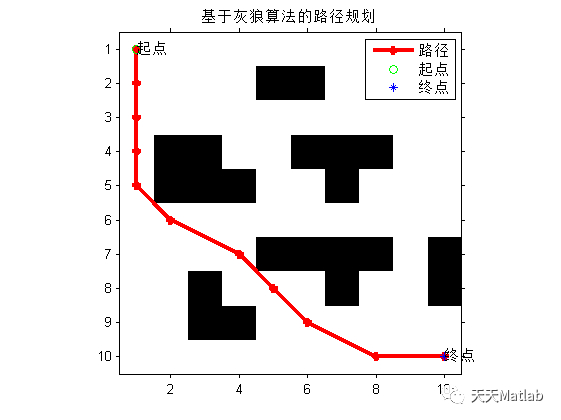
移动机器人集中了传感器技术,机电自动化控制,计算机及人工智能等多方面跨学科技术,其发展是一个国家高科技水平和工业自动化程度的重要体现.近年来,作为移动机器人现实应用的关键技术之一,避障路径规划也渐渐地成为各国学者研究的热点与焦点.在路径规划的过程中,移动机器人需要规划出一条从起点到目标点的避碰最优路径,因此本课题对移动机器人避障路径规划算法开展研究,具有理论与现实的意义.针对目前移动机器人在路径规划方面存在的问题,本文进行了分析和研究,其中包括在一般环境下移动机器人的全局路径规划,栅格图环境下的全局路径规划及包含局部路径规划的混合路径规划.
⛄ 部分代码
% 灰狼算法,这块直接用的灰狼算法源代码
function [Alpha_score,Alpha_pos,Convergence_curve]=GWO(SearchAgents_no,Max_iter,lb,ub,dim,fobj)
% initialize alpha, beta, and delta_pos这就是那三个狼,α狼,β狼和德尔塔狼 ,设定狼群
Alpha_pos=zeros(1,dim);
Alpha_score=inf; %change this to -inf for maximization problems
Beta_pos=zeros(1,dim);
Beta_score=inf; %change this to -inf for maximization problems
Delta_pos=zeros(1,dim);
Delta_score=inf; %change this to -inf for maximization problems
%Initialize the positions of search agents,初始化位置
Positions=initialization(SearchAgents_no,dim,ub,lb);
Convergence_curve=zeros(1,Max_iter);
l=0;% Loop counter
% Main loop
while l<Max_iter
for i=1:size(Positions,1)
% Return back the search agents that go beyond the boundaries of the search space
Flag4ub=Positions(i,:)>ub;
Flag4lb=Positions(i,:)<lb;
Positions(i,:)=(Positions(i,:).*(~(Flag4ub+Flag4lb)))+ub.*Flag4ub+lb.*Flag4lb;
Positions(i,:) = sort(Positions(i,:));
% Calculate objective function for each search agent
fitness=fobj(Positions(i,:));
% Update Alpha, Beta, and Delta
if fitness<Alpha_score
Alpha_score=fitness; % Update alpha
Alpha_pos=Positions(i,:);
end
if fitness>Alpha_score && fitness<Beta_score
Beta_score=fitness; % Update beta
Beta_pos=Positions(i,:);
end
if fitness>Alpha_score && fitness>Beta_score && fitness<Delta_score
Delta_score=fitness; % Update delta
Delta_pos=Positions(i,:);
end
end
a=2-l*((2)/Max_iter); % a decreases linearly fron 2 to 0
% Update the Position of search agents including omegas
for i=1:size(Positions,1)
for j=1:size(Positions,2)
r1=rand(); % r1 is a random number in [0,1]
r2=rand(); % r2 is a random number in [0,1]
A1=2*a*r1-a; % Equation (3.3)
C1=2*r2; % Equation (3.4)
D_alpha=abs(C1*Alpha_pos(j)-Positions(i,j)); % Equation (3.5)-part 1
X1=Alpha_pos(j)-A1*D_alpha; % Equation (3.6)-part 1
r1=rand();
r2=rand();
A2=2*a*r1-a; % Equation (3.3)
C2=2*r2; % Equation (3.4)
D_beta=abs(C2*Beta_pos(j)-Positions(i,j)); % Equation (3.5)-part 2
X2=Beta_pos(j)-A2*D_beta; % Equation (3.6)-part 2
r1=rand();
r2=rand();
A3=2*a*r1-a; % Equation (3.3)
C3=2*r2; % Equation (3.4)
D_delta=abs(C3*Delta_pos(j)-Positions(i,j)); % Equation (3.5)-part 3
X3=Delta_pos(j)-A3*D_delta; % Equation (3.5)-part 3
Positions(i,j)= round((X1+X2+X3)/3);% Equation (3.7)
end
end
l=l+1;
Convergence_curve(l)=Alpha_score;
end
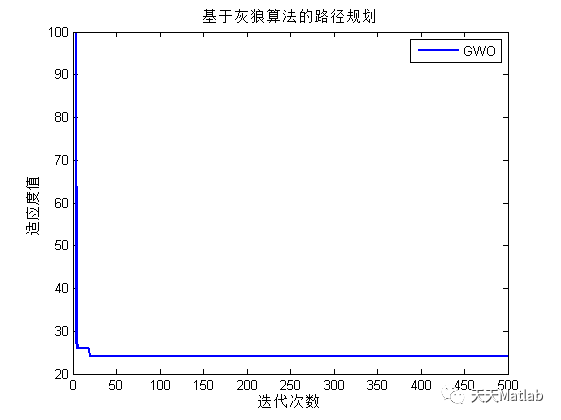
⛄ 运行结果

⛄ 参考文献
[1]宁旭成, 张倩, 王续红. 基于灰狼算法的厂房巡检机器人路径规划[J]. 中国新技术新产品, 2021(10):4.
[2]刘宁宁, 王宏伟. 基于改进灰狼优化算法的移动机器人路径规划[J]. 电测与仪表, 2020, 57(1):9.
⛄ 完整代码
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
















 2466
2466











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











