







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
⛄ 内容介绍
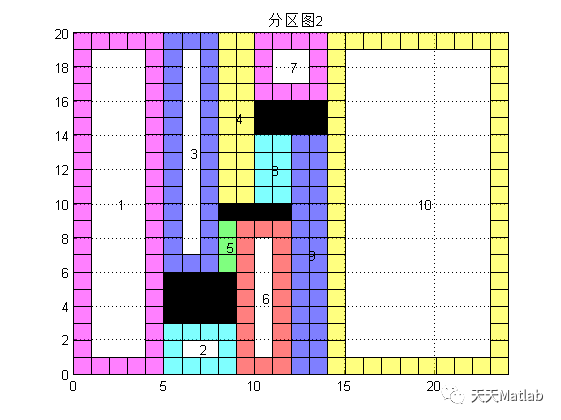
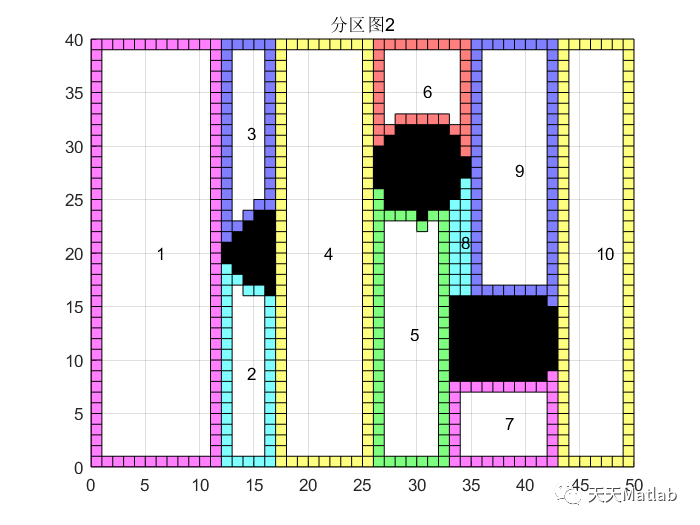
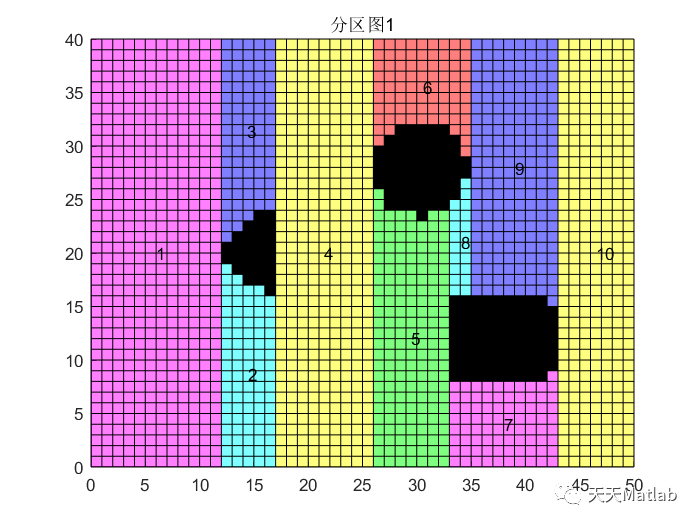
基于A*(A-star)算法实现多机器人牛耕式分区路径规划可以按照以下步骤进行:
-
确定地图和分区:将工作区域划分为多个分区,并构建相应的地图表示。每个分区可以是一个网格,其中包含障碍物和可行走区域。
-
确定机器人初始位置和目标位置:对于每个机器人,指定其初始位置和需要到达的目标位置。
-
初始化起始节点和开放列表:为每个机器人设置起始节点,将其加入到对应的机器人的开放列表中。
-
运行A算法:对于每个机器人,运行A算法来搜索从初始位置到目标位置的最佳路径。A*算法使用启发式函数来评估每个节点的代价,并选择代价最小的节点进行扩展。
-
节点扩展和路径生成:对于每个机器人的开放列表,循环执行以下步骤:
-
从开放列表中选择代价最小的节点,将其标记为当前节点。
-
根据当前节点,扩展相邻的节点,并计算扩展节点的代价。
-
更新节点的代价和父节点信息。
-
如果目标节点被添加到开放列表中,则终止扩展,并生成路径。
-
-
碰撞检测:在生成的路径上进行碰撞检测,确障碍物之间没有碰撞。
-
重复步骤3器人都找到了可行的路径。
-
执行路径:根据生成的路径,依次执行每个机器人的移动来完成牛耕式分区任务。
需要注意的是,在实际应用中,还需考虑机器人之间的冲突避免、动态障碍物、动态目标等因素,可能需要结合其他算法和策略来优化路径规划结果。此外,A算法有多种扩展和改进的变体,如D算法、A* + epsilon算法等,根据具体需求可以选择适合的算法。
⛄ 部分代码
clc
clear
close all
row=40;
col=50;
ImpRgb = imread('003.png');
ImpRgb=imresize(ImpRgb,[row col]);
Imp = rgb2gray(ImpRgb);
sign=im2bw(Imp,0.5);
sign=~sign;
sign=flipud(sign);
figure(1)%画图
hold on
axis([0 col 0 row]);
grid on;
title('分区图1')
for i=1:row
for j=1:col
if sign(i,j)==1
y=[i-1,i-1,i,i];
x=[j-1,j,j,j-1];
h=fill(x,y,'k');
set(h,'facealpha',1)
end
end
end
sign_ori=sign;%记录原始的障碍矩阵
sign_fenqu=[];
⛄ 运行结果

⛄ 参考文献
[1] 周宇杭,王文明,李泽彬,等.基于A星算法的移动机器人路径规划应用研究[J].电脑知识与技术:学术版, 2020, 16(13):4.DOI:CNKI:SUN:DNZS.0.2020-13-001.
[2] 路永乐,韩亮,杨杰,等.一种基于空间约束A星算法的移动机器人路径规划方法:CN202210292480.8[P].CN202210292480.8[2023-06-24].
















 1666
1666











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











