






 本文介绍了五大经典智能优化算法(PSO、GA、DE、GWO和SSA)在机器人路径规划中的应用,展示了在简单和复杂路径下的性能,并通过收敛曲线对比了算法的优劣。
本文介绍了五大经典智能优化算法(PSO、GA、DE、GWO和SSA)在机器人路径规划中的应用,展示了在简单和复杂路径下的性能,并通过收敛曲线对比了算法的优劣。
本期文章采用五大经典的智能优化算法,对机器人路径进行规划。
五大经典算法分别是:粒子群算法(PSO),遗传算法(GA),差分进化算法(DE),灰狼优化算法(GWO),麻雀优化算法(SSA)。
学会这五种算法后,其他任何智能优化算法可以随意替换!地图也是可以随意更改!
参考一些论文,还可以将改进的智能算法用于机器人路径规划中,突出改进智能算法的优势!
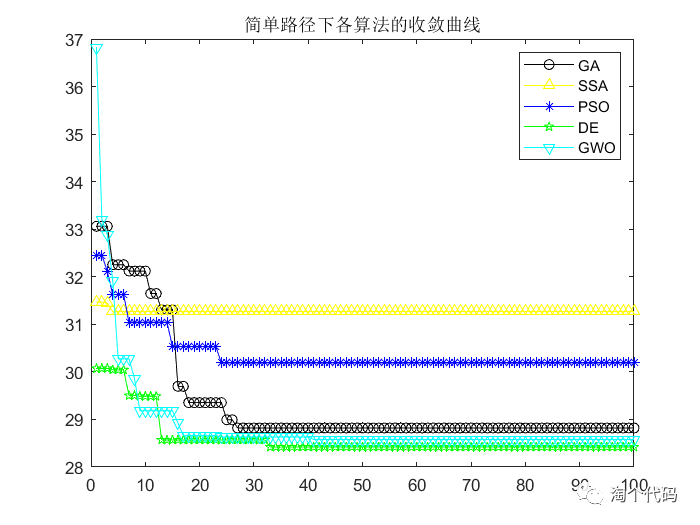
接下来先上结果图:其中,红线表示遗传算法,黄线表示麻雀算法,蓝线表示粒子群算法,绿线表示差分进化算法,青线表示灰狼算法。
简单路径规划结果
复杂路径规划结果
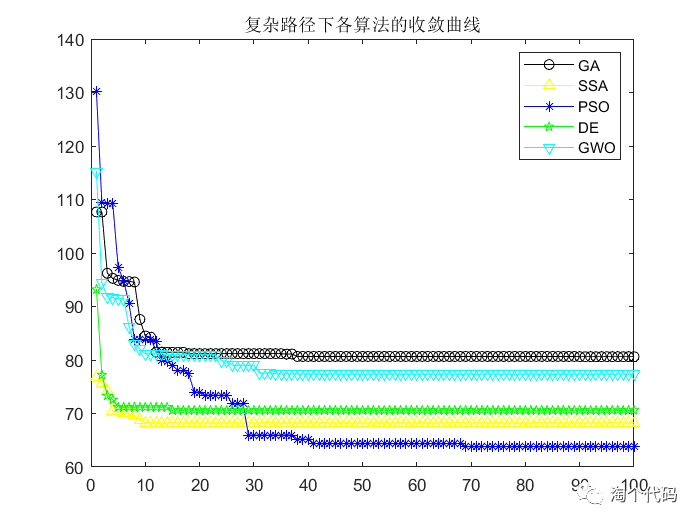

在复杂路径下,其实更能展现一个算法的优劣!因此可以将改进的智能算法用于此模型中,算法替换十分简单!
部分代码展示
clc
clear
close all
tic
%% 地图
G=[0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 0 0 1 0 1 1 1 1 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0 0;
0 1 1 1 0 0 0 1 1 0 0 0 1 1 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0;
1 1 0 1 0 0 0 0 0 0 0 0 0 0 0 1 1 1 1 0;
1 1 0 1 0 0 1 1 0 0 0 1 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 0 1 1 1 0 0 0 0 0 1 1 0;
0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0 0 1 1 0;
0 0 0 1 1 0 0 0 0 0 1 1 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0;];
num = size(G,1);
for i=1:num/2
for j=1:num
m=G(i,j);
n=G(num+1-i,j);
G(i,j)=n;
G(num+1-i,j)=m;
end
end
%%
S = [1 1];
E = [num num];
G0 = G;
G = G0(S(1):E(1),S(2):E(2));
[Xmax,dimensions] = size(G); X_min = 1;
dimensions = dimensions - 2;
%% 参数设置
max_gen = 100; % 最大迭代次数
num_polution = 50; % 种群数量
fobj=@(x)fitness(x,G);
[Best_score,Best_pos,GA_curve]=GA(num_polution,max_gen,X_min,Xmax,dimensions,fobj,G);
%结果分析
Best_pos = round(Best_pos);
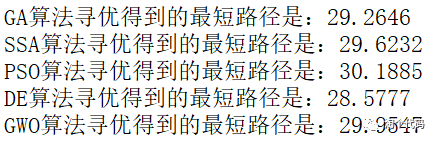
disp(['GA算法寻优得到的最短路径是:',num2str(Best_score)])
route = [S(1) Best_pos E(1)];
path_GA=generateContinuousRoute(route,G);
path_GA=GenerateSmoothPath(path_GA,G);
path_GA=GenerateSmoothPath(path_GA,G);
[Best_score,Best_pos,SSA_curve]=SSA(num_polution,max_gen,X_min,Xmax,dimensions,fobj,G);
%结果分析
Best_pos = round(Best_pos);
disp(['SSA算法寻优得到的最短路径是:',num2str(Best_score)])
route = [S(1) Best_pos E(1)];
path_SSA=generateContinuousRoute(route,G);
path_SSA=GenerateSmoothPath(path_SSA,G);
path_SSA=GenerateSmoothPath(path_SSA,G);
[Best_score,Best_pos,PSO_curve]=PSO(num_polution,max_gen,X_min,Xmax,dimensions,fobj,G);
%结果分析
Best_pos = round(Best_pos);
disp(['PSO算法寻优得到的最短路径是:',num2str(Best_score)])
route = [S(1) Best_pos E(1)];
path_PSO=generateContinuousRoute(route,G);
path_PSO=GenerateSmoothPath(path_PSO,G);
path_PSO=GenerateSmoothPath(path_PSO,G);
[Best_score,Best_pos,DE_curve]=DE(num_polution,max_gen,X_min,Xmax,dimensions,fobj,G);
%结果分析
Best_pos = round(Best_pos);
disp(['DE算法寻优得到的最短路径是:',num2str(Best_score)])
route = [S(1) Best_pos E(1)];
path_DE=generateContinuousRoute(route,G);
path_DE=GenerateSmoothPath(path_DE,G);
path_DE=GenerateSmoothPath(path_DE,G);
[Best_score,Best_pos,GWO_curve]=GWO(num_polution,max_gen,X_min,Xmax,dimensions,fobj,G);
%结果分析
Best_pos = round(Best_pos);
disp(['GWO算法寻优得到的最短路径是:',num2str(Best_score)])
route = [S(1) Best_pos E(1)];
path_GWO=generateContinuousRoute(route,G);
path_GWO=GenerateSmoothPath(path_GWO,G);
path_GWO=GenerateSmoothPath(path_GWO,G);
%% 画寻优曲线
figure(1)
plot(GA_curve,'k-o')
hold on
plot(SSA_curve,'y-^')
hold on
plot(PSO_curve,'b-*')
hold on
plot(DE_curve,'g-P')
hold on
plot(GWO_curve,'c-v')
legend('GA','SSA','PSO','DE','GWO')
title('简单路径下各算法的收敛曲线')代码目录
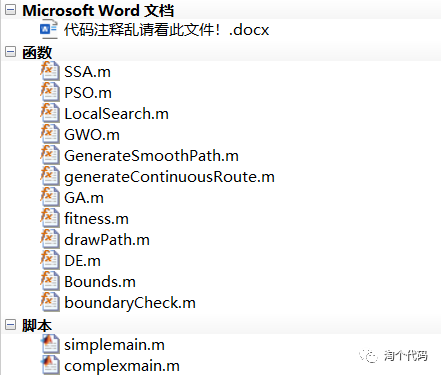
其中simplemain.m是简单路径规划,complexmain.m是复杂路径规划。运行这两个脚本文件即可!
点击下方卡片获取更多代码!


















 2668
2668

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











