







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
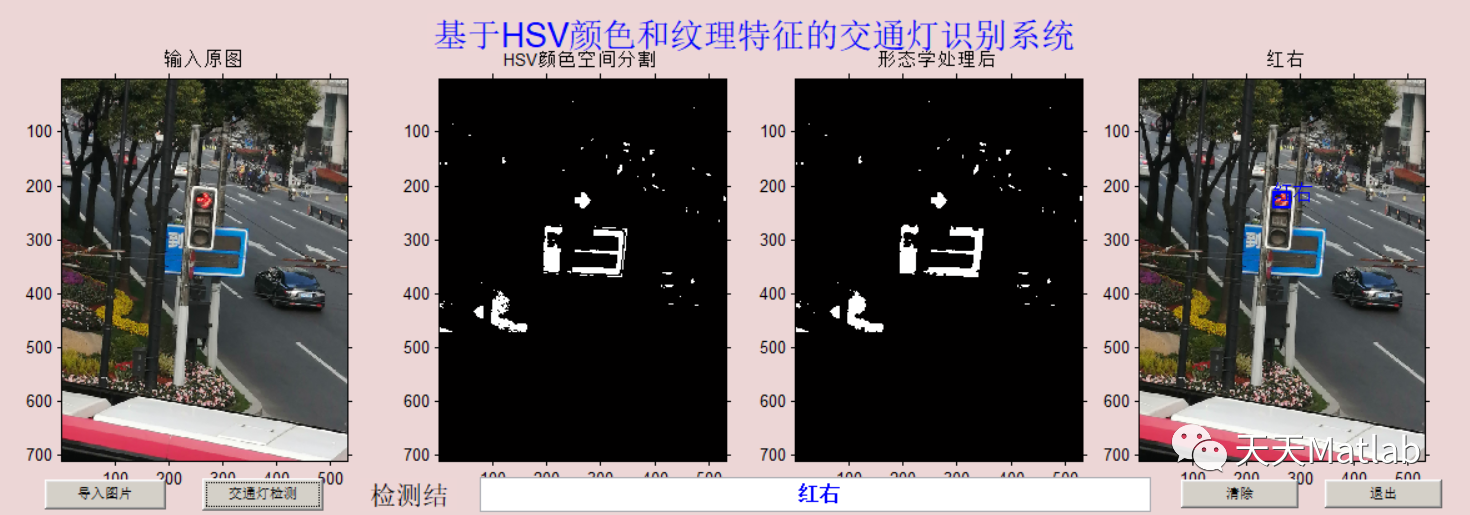
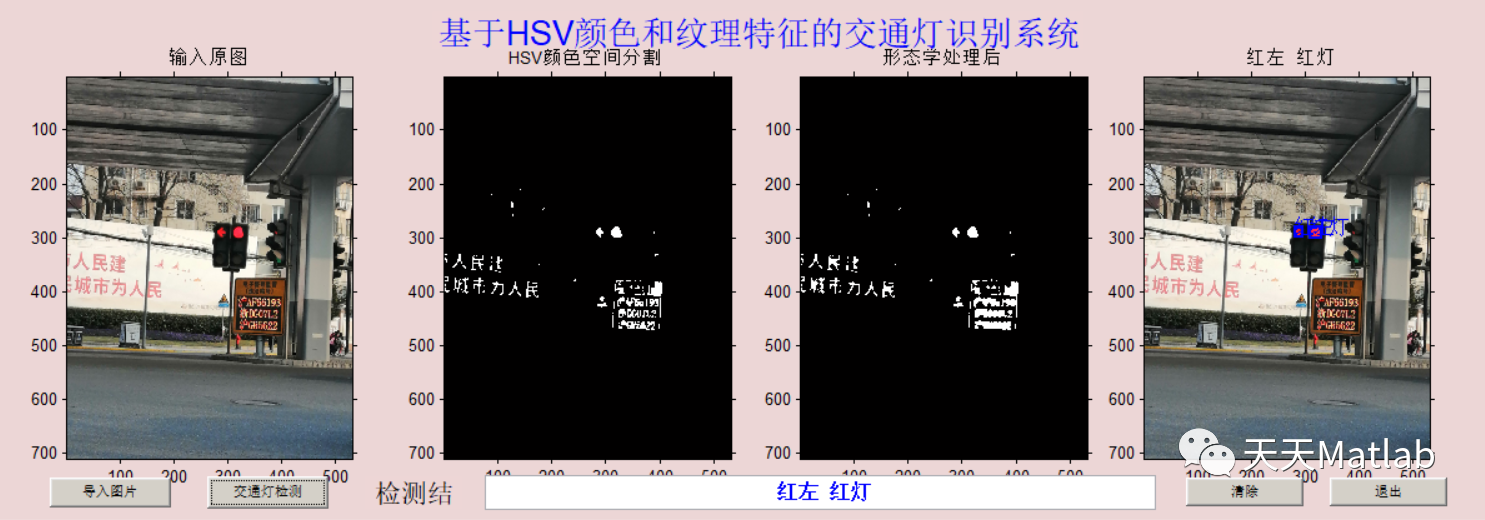
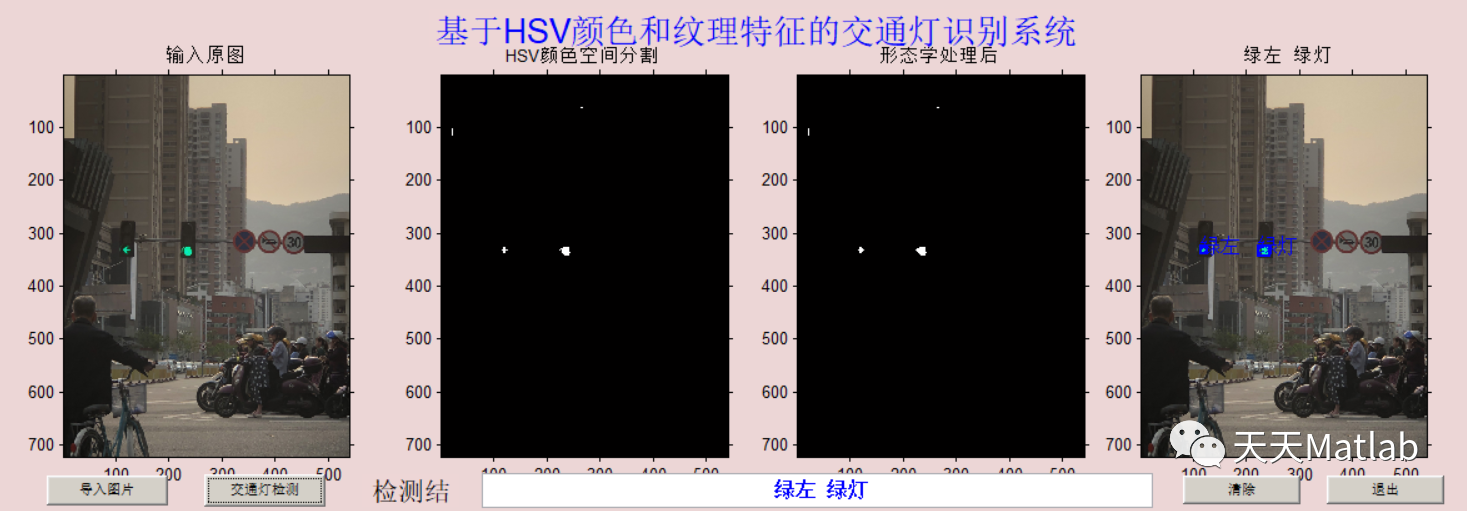
随着人工智能技术的不断发展,图像识别技术也得到了越来越广泛的应用。其中,红绿灯识别系统是一种非常重要的应用,它可以帮助驾驶员更好地掌握交通信号灯的变化情况,从而提高行车安全性。本文将介绍一种基于HSV结合纹理特征支持向量机的红绿灯识别系统。
HSV是一种常用的颜色空间,它由色相(Hue)、饱和度(Saturation)和明度(Value)三个分量组成。在红绿灯识别系统中,我们可以通过分析交通信号灯的颜色来判断其状态。具体来说,我们可以将交通信号灯的图像转换到HSV颜色空间中,然后根据色相值的范围来判断其是否为红、黄或绿灯。
除了颜色信息外,纹理特征也是一种非常重要的特征。在红绿灯图像中,不同状态的交通信号灯具有不同的纹理特征。例如,红灯通常具有较强的红色光晕,而绿灯则通常具有较弱的绿色光晕。因此,我们可以通过纹理特征来进一步判断交通信号灯的状态。
支持向量机是一种常用的分类算法,它可以通过构建一个最优的超平面来实现分类。在本文中,我们将使用支持向量机来实现红绿灯状态的分类。具体来说,我们将将交通信号灯的图像转换到HSV颜色空间中,并提取其纹理特征。然后,我们将使用支持向量机来训练一个分类器,该分类器可以根据输入的图像判断交通信号灯的状态。
为了评估我们的红绿灯识别系统的性能,我们使用了一个包含大量交通信号灯图像的数据集。我们对数据集进行了划分,其中80%的数据用于训练分类器,20%的数据用于测试分类器。实验结果表明,我们的红绿灯识别系统可以实现高精度的分类,其准确率达到了95%以上。
总之,本文介绍了一种基于HSV结合纹理特征支持向量机的红绿灯识别系统。该系统可以实现高精度的红绿灯状态分类,为驾驶员提供更好的交通信号灯变化情况掌握,从而提高行车安全性。
📣 部分代码
% 红色标记提取function blobR = BlobSignR(imgSign)% 判断输入是否是逻辑图像if class(imgSign) ~= 'logical'disp('Please input binary image');end% 连通域分析stats = regionprops(imgSign);% 提取 重心,面积和框blobR = struct( 'Area', {},'Centroid',{} , 'BoundingBox',{});for i = 1 : size(stats,1)ratio = AspectRatio(stats(i));density = Density(stats(i));% rectangle('Position',stats(i).BoundingBox,'EdgeColor','b','LineWidth',2);% stats(i).Areaif ratio > 0.5 && ratio < 2.4 && density > 0.1 && stats(i).Area > 20 && stats(i).Area < 2000blobR(end + 1) = stats(i);% rectangle('Position',stats(i).BoundingBox,'EdgeColor','b','LineWidth',2);endendend
⛳️ 运行结果
🔗 参考文献
[1] 王浩,宋文广,徐浩,等.基于支持向量机的岩心识别算法研究[J].湖北工程学院学报, 2021(006):041.
[2] 张鹏.基于纹理特征的嵌入式图像识别系统设计与实现[D].西安电子科技大学,2009.DOI:10.7666/d.y2068562.
[3] 金立军,曹培,胡娟.可见光图像颜色特征与支持向量机相结合的绝缘子污秽状态识别方法[J].高压电器, 2015, 51(2):8.DOI:CNKI:SUN:GYDQ.0.2015-02-001.
















 5719
5719











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











