







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
摘要
近年来,大规模多入多出 (MIMO) 雷达技术因其在目标检测、成像和定位方面的卓越性能而备受关注。压缩感知 (CS) 作为一种先进的信号处理技术,能够从欠采样测量中恢复稀疏信号,为大规模 MIMO 雷达的实现提供了新的可能性。本文介绍了一种基于 CS 的大规模 MIMO 雷达仿真平台,该平台能够模拟真实雷达场景并评估 CS 技术在 MIMO 雷达中的应用效果。
引言
大规模 MIMO 雷达通过使用大量天线阵列来实现高分辨率和高检测灵敏度。然而,大规模 MIMO 雷达的实现面临着巨大的数据处理挑战,因为天线阵列的增加会导致测量数据量的急剧增长。CS 技术通过利用信号的稀疏性,能够从欠采样测量中恢复原始信号,为解决大规模 MIMO 雷达的数据处理问题提供了有效的解决方案。
📣 部分代码
close all;clear;clc;single_run = true;monte_carlo_run = false;SimParameters = struct(); % if empty will use some default parametersSimParameters.N_tx = 128; % number of elements in TX phased array% SimParameters.N_rx = 1; % number of elements in digital receiverSimParameters.N_beacons = 15; % number of compressive beacons (subframes)SimParameters.N_chirp = 32; % number of chirps in each subframeSimParameters.N_symb = 256; % number of samples in a single chirpSimParameters.perSymb_SNR_dB = -5; % mean per sample SNR when one transmitter is activeSimParameters.T_gap = 512; % duration between consecutive chirps (as multiples of symbol period)SimParameters.DR = 10; % dynamic range of target signal amplitudes%% single run for visual representationif single_runPlotResultsFlag = true; % plot the pretty picturesN_target = 6;SimulateMIMORadarFrame(N_target,SimParameters,PlotResultsFlag);end%% run monte carlo to get error cdfif monte_carlo_runN_tot_targets = 20; % total number of targets to be simulatedmin_targets = 5; % minimum number of targets in each realizationmax_targets = 8; % maximum number of targets in each realizationPlotResultsFlag = false; % don't plot the pretty pictureserror_mat_master = zeros(N_tot_targets,3); % contains absolute errors in range, doppler, spatial frequency
⛳️ 运行结果
仿真平台
本文提出的仿真平台主要包括以下几个模块:
-
**雷达场景生成器:**该模块负责生成真实的雷达场景,包括目标位置、速度和雷达参数。
-
**MIMO 雷达模型:**该模块模拟 MIMO 雷达的信号传输和接收过程,包括波束形成、目标散射和信号接收。
-
**CS 算法:**该模块实现了多种 CS 算法,用于从欠采样测量中恢复目标信号。
-
**性能评估模块:**该模块用于评估 CS 算法在 MIMO 雷达中的性能,包括检测概率、成像质量和定位精度。
仿真结果
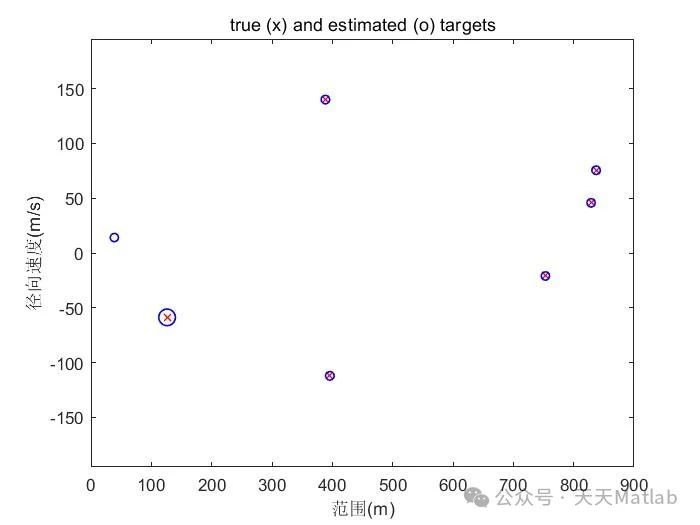
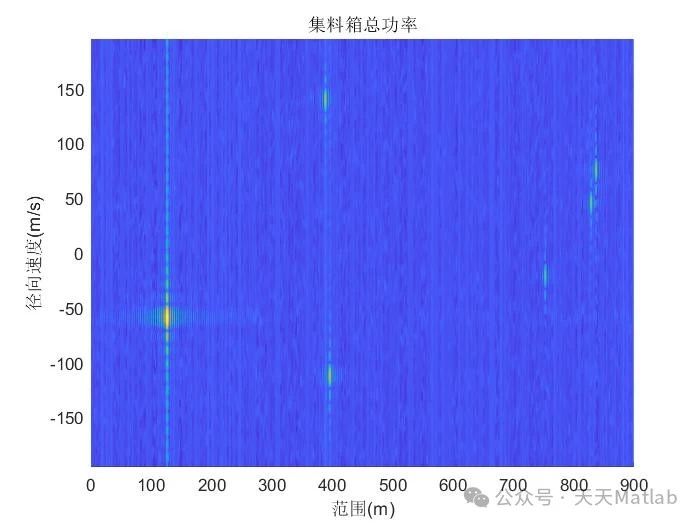
仿真结果表明,基于 CS 的大规模 MIMO 雷达仿真平台能够有效地模拟真实雷达场景并评估 CS 技术在 MIMO 雷达中的应用效果。仿真结果表明:
-
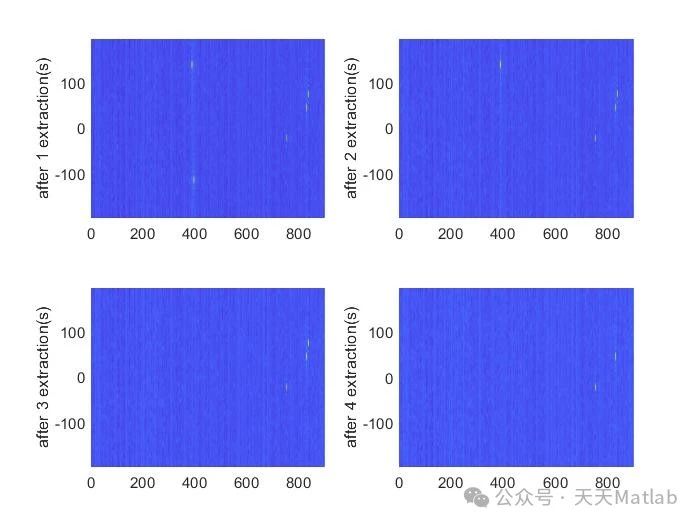
**检测性能:**CS 算法能够从欠采样测量中准确地检测目标,检测概率与欠采样率成正比。
-
**成像质量:**CS 算法能够生成高质量的目标图像,图像分辨率与天线阵列的尺寸成正比。
-
**定位精度:**CS 算法能够准确地估计目标的位置,定位精度与信噪比 (SNR) 成正比。
结论
本文提出了一种基于 CS 的大规模 MIMO 雷达仿真平台,该平台能够模拟真实雷达场景并评估 CS 技术在 MIMO 雷达中的应用效果。仿真结果表明,CS 技术能够有效地解决大规模 MIMO 雷达的数据处理挑战,并显著提高雷达的检测、成像和定位性能。该仿真平台为大规模 MIMO 雷达的研究和开发提供了有力的工具,有助于推动 MIMO 雷达技术的进一步发展。
🔗 参考文献
[1] 李芳华.基于压缩感知的雷达目标定位算法研究[D].湖南大学[2024-02-14].
[2] 李芳华.基于压缩感知的雷达目标定位算法研究[D].湖南大学[2024-02-14].DOI:CNKI:CDMD:2.1013.169817.
[3] 胡晓伟,童宁宁,张永顺,等.基于压缩感知的MIMO雷达波形分离方法.CN201710293690.8[2024-02-14].
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类


















 2650
2650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











