






1.简介
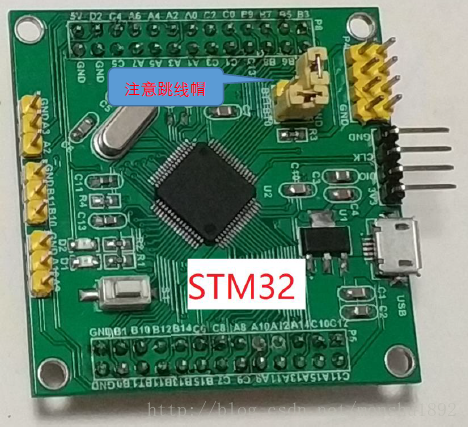
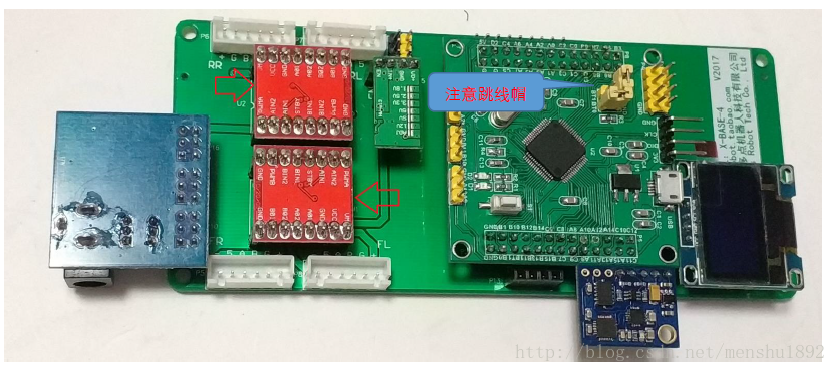
xrobot_M4的Stm32开发板有两块,底板和核心板,底板为自己设计,核心板为供应商设计,底板有原理图,而核心板没有原理图。
2.底板原理图
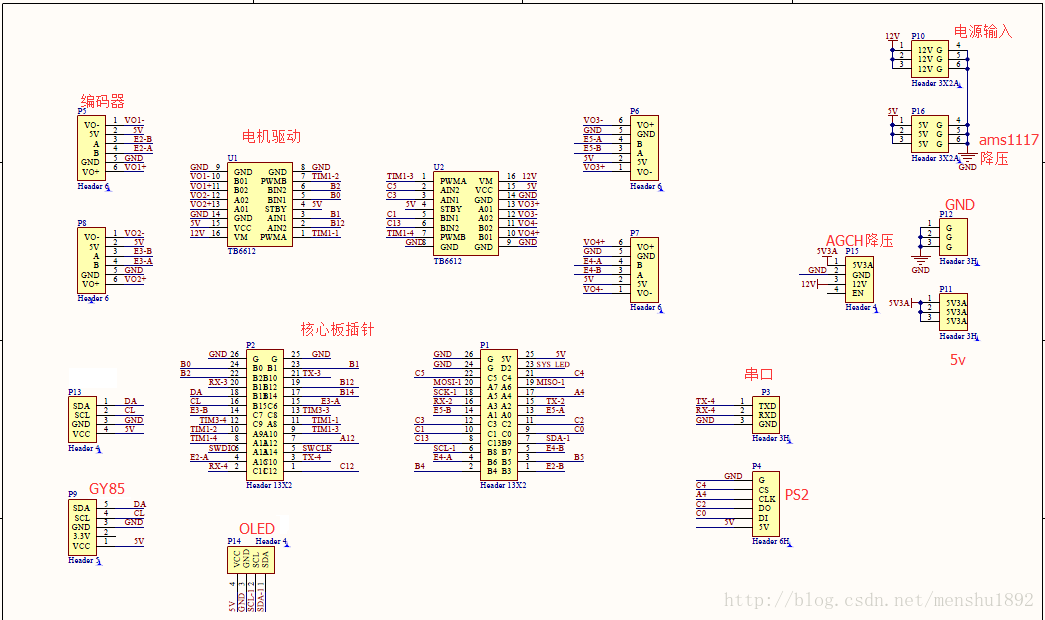
几点注意:
1.上面的GY85是一个9轴IMU传感器
2.有两个5v输出,其中AGCH芯片输出的是3A给树莓派供电。
3.P13没有接东西
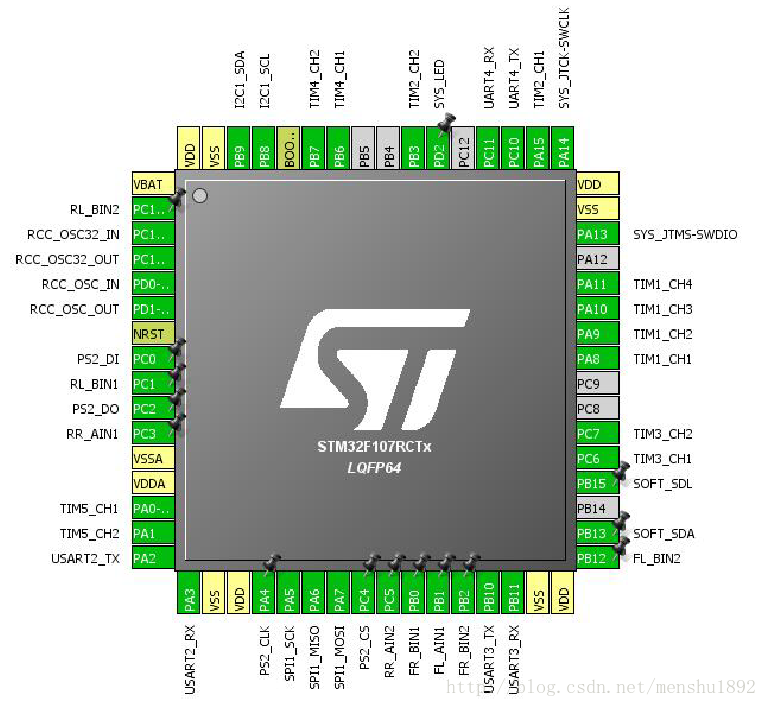
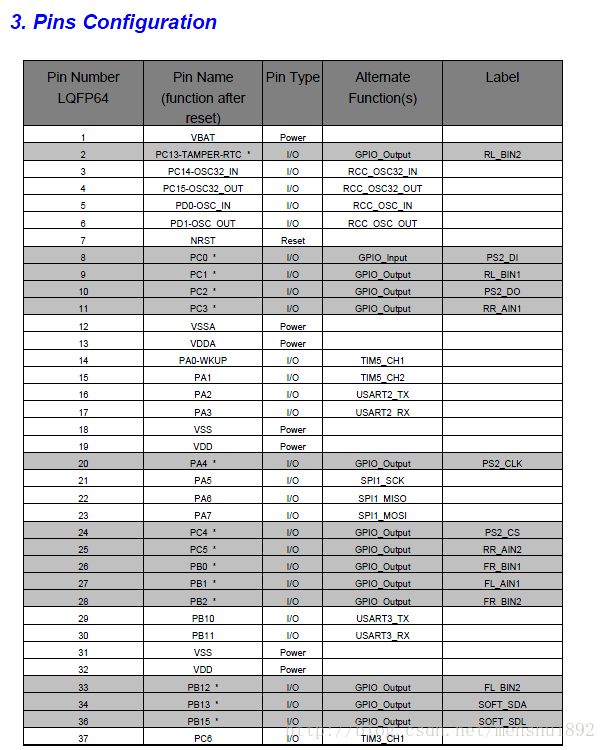
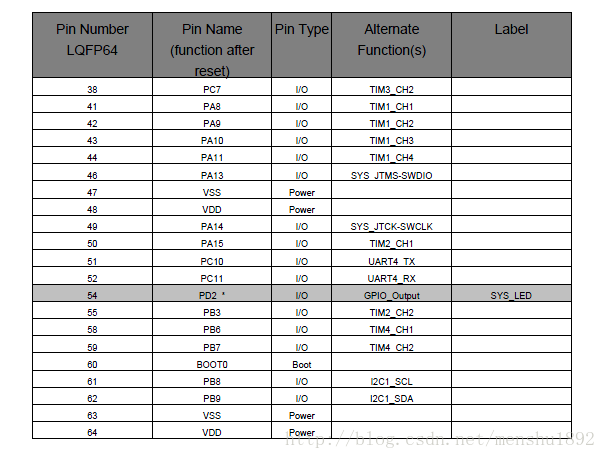
3.核心板原理
主要的要点就是核心板有一个SWD接口,但是没有USB下载设置。

xrobot_M4的Stm32开发板有两块,底板和核心板,底板为自己设计,核心板为供应商设计,底板有原理图,而核心板没有原理图。
几点注意:
1.上面的GY85是一个9轴IMU传感器
2.有两个5v输出,其中AGCH芯片输出的是3A给树莓派供电。
3.P13没有接东西
主要的要点就是核心板有一个SWD接口,但是没有USB下载设置。











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


















 2087
2087





