






关注公众号,发现CV技术之美
机器人顶级会议 ICRA 2024 即将于 5月13日 至 5月17日 在日本横滨举办。上海人工智能实验室 OpenMMLab 浦视开源体系团队聚焦机器感知和自动驾驶的核心问题,联合新加坡国立大学、卡耐基梅隆大学、新加坡南洋理工大学、上海科技大学等国内外高校,共同于会议期间主办了2024 RoboDrive 挑战赛。

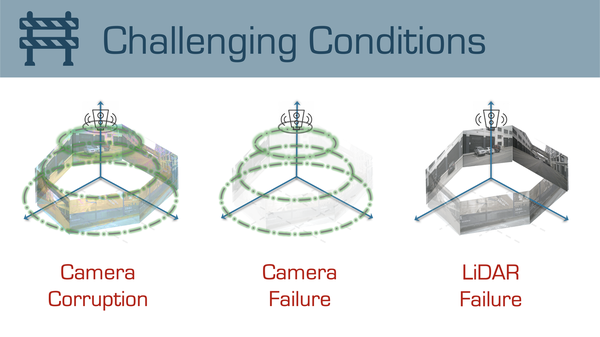
本次挑战赛涵盖自动驾驶感知中的关键难题,共设立了包括 BEV检测、鸟瞰图分割、语义占用预测和深度估计等任务在内的五个赛道。优胜者们将获得共计一万美金的现金奖励,并在研讨会上做出突出展示和亮点报告。
技术的未来在这里开始。在即将到来的研讨会中,我们将一窥顶尖团队如何利用先进的机器学习算法和数据处理技术,解决实际问题,优胜队伍将分享他们的创新方法,以及这些技术如何能够被广泛应用到自动驾驶及其他领域。
研讨会时间:北京时间 5月15日 (下周三) 下午的 2点 至 6点,于 ICRA 2024 会议期间同步举办
研讨会地点 (线下):Competition Hall, Pacific Convention Plaza Yokohama (PACIFICO Yokohama) 1-1-1, Minato Mirai, Nishi-ku, Yokohama, Japan
研讨会地点 (线上):ZOOM会议实时免费同步直播,链接为 https://cmu.zoom.us/j/96870741709?pwd=UjI1bUhtU1k2MCt5c2Z5VFlaNnc4QT09
挑战赛回顾
本届挑战赛吸引了来自全球11个国家、93个机构的共140支队伍参赛。参赛队伍涵盖了由高校、工业界、科研实验室以及混合组队等方式组成的共两百余名参赛者。

各参赛队伍热情参与,在五个赛道的评测服务器上共计提交了866次预测文件,并将基线 3D 感知模型的性能和鲁棒性提升到了全新的水平。
在历时近3个月的激烈竞争后,本届RoboDrive挑战赛从140支来自全球的队伍中精选出了15支优胜队伍。这些队伍不仅展示了技术上的卓越,也体现了跨学科合作的力量。他们将在 5月15日下午的研讨会上详细解读其比赛方案,展示如何通过创新技术解决自动驾驶感知中的复杂问题。
优胜队伍来自世界各地的学术界和工业界,展现了广泛的背景和专业知识。例如,有的团队利用最新的机器学习算法优化传感器数据处理,有的则开发了新型算法以更准确地识别和分类路面上的障碍物。这些解决方案不仅针对比赛中的具体任务,也提供了对自动驾驶技术未来发展的深刻洞察。


研讨会上,各队伍将分享他们的技术细节和创新过程,参与者将有机会深入了解各种先进技术如何在实际环境中应用,以及这些技术如何帮助自动驾驶系统更好地理解和反应于复杂的驾驶环境。此外,优胜队伍还将接受来自比赛赞助商 华为诺亚方舟实验室 的证书和奖金奖励,这些奖励不仅认可了他们的技术成就,也鼓励了持续的创新和发展。
这些队伍通过他们的努力和创新,不仅为本次挑战赛增添了光彩,也为自动驾驶领域带来了新的思考和可能性。我们期待在研讨会上看到他们的精彩展示,并通过他们的实例进一步推动自动驾驶技术的发展。
值得一提的是,上海人工智能实验室 OpenMMLab 浦视开源体系团队所构建的 MMDetection3D 代码库对本届 RoboDrive 挑战赛提供了全程技术支持。
MMDetection3D 是一个高性能、结构化的开源代码库,其收录了包括 3D目标检测、激光雷达语义分割、语义占用预测等任务在内的数十种开源模型。这一平台不仅提供了实验验证的工具,还通过其灵活和模块化的设计,使得参赛团队能够快速实现创新方案,并在比赛中验证其有效性。
MMDetection3D 有着广泛的社区影响力。它不仅是一个代码库,也建立了一个活跃的开发者和用户社区。这个社区围绕着共同的兴趣和目标聚集,分享知识,解决问题,并持续推动 3D 感知技术的边界。社区成员包括来自世界各地的学者、研究人员和工程师,他们共同协作,分享经验,提供反馈,从而不断改进和扩展 MMDetection3D 的功能。
特邀报告
本次研讨会特别邀请了三位在自动驾驶技术感知安全领域具有研究背景的专家,他们将分享最新研究成果和未来发展趋势。这些报告将涵盖从机器学习算法到传感器配置的各种技术挑战,为参与者提供前沿科技的深度解析和实际应用的宝贵见解。
报告主题1: Challenges and Future Directions in Safe Autonomous Driving
内容简介: Wenhao Ding 博士将探讨自动驾驶安全领域面临的主要挑战及未来发展方向。Wenhao 即将加入 NVIDIA Autonomous Vehicle Research Group 担任研究科学家。他于 2024 年毕业于卡内基梅隆大学 Safe AI 实验室。他的研究重点是安全关键场景的生成。他对强化学习、深度生成模型和因果发现感兴趣。攻读博士学位期间,他曾在 NVIDIA、Amazon 和 Bosch Center for Artificial Intelligence 实习。
报告主题2: Towards Robust 3D Perception in Challenging Conditions
内容简介: Lingdong Kong 将分享他在 3D 感知系统在复杂条件下感知可靠性的研究成果。Lingdong 是新加坡国立大学计算机学院在读博士生。他的研究重点是稳健且可扩展的3D感知和生成。他的研究课题涵盖数据高效学习、视觉表征学习和 3D 感知鲁棒性等。他于 NVIDIA Research、ByteDance AI Lab、OpenMMLab 和 Motional 等企业/实验室参与科研实习。
报告主题3: Optimizing Sensor Placements for Robust Driving Perception

内容简介: Ye Li 将讨论传感器优化配置对于增强自动驾驶感知系统鲁棒性的研究。Ye 是密歇根大学安娜堡分校机器人学专业的硕士生,他本科毕业于吉林大学汽车工程学院。他的研究方向包括自动驾驶感知和仿真,特别是在恶劣天气和传感器故障等具有挑战性的条件下的感知/仿真性能。
结语
RoboDrive 挑战赛不仅是一场技术的竞赛,更是一次关于未来科技方向的深度对话。我们诚邀全球的技术爱好者、行业专家和学者加入我们,通过这个平台,共同探讨和定义智能交通和自动驾驶的未来走向。在ICRA 2024的大舞台上,让我们共同见证这一刻,感受那些即将改变世界的创新技术。
RoboDrive 研讨会将于5月15日 (下周三) 下午的 2点 至 5点举行,我们届时不见不散!

END
欢迎加入「自动驾驶」交流群👇备注:AD















 164
164











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









