







问题目录
- 问题1:RuntimeError: Expected all tensors to be on the same device, but found at least two devices, cpu and cuda:0
- 问题2:OSError: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.27' not found
- 问题3:RuntimeError: result type Float can't be cast to the desired output type Long
- 问题4:UnicodeDecodeError: 'gbk' codec can't decode byte 0xb4 in position 178: illegal multibyte sequence
- 问题5:ValueError: could not convert string to float: ‘30.226,42.7354,1.90
- 问题6:Command "python setup.py egg_info" failed with error code 1 in C:\Users\xxx\pip-build-ecnk45nt\pywinpty\
- 问题7:Failed building wheel for numba
- 问题8:AttributeError: 'numpy.float64' object has no attribute 'detach'
- 问题9: Error in `python': free(): invalid pointer: 0x000055ca0b8d2e08
- 问题10:AssertionError: Checkpoint detectron2://ImageNetPretrained/MSRA/R-101.pkl not found!
- 问题11:Input type (torch.cuda.DoubleTensor) and weight type (torch.cuda.FloatTensor) should be the same
- 问题12:TypeError: '<' not supported between instances of 'State' and 'State' heapq.heappush(pq, State(nextX, nextY, effortToNextNode))
- 问题13:AttributeError: module 'distutils' has no attribute 'version'
- 问题14: AttributeError: module 'numpy' has no attribute 'bool'?
- 问题15:ERROR: Could not install packages due to an OSError: [Errno 28] No space left on device
- 问题16:Input type (torch.FloatTensor) and weight type (torch.cuda.FloatTensor) should be the same
问题1:RuntimeError: Expected all tensors to be on the same device, but found at least two devices, cpu and cuda:0
RuntimeError: Expected all tensors to be on the same device, but found at least two devices, cpu and cuda:0
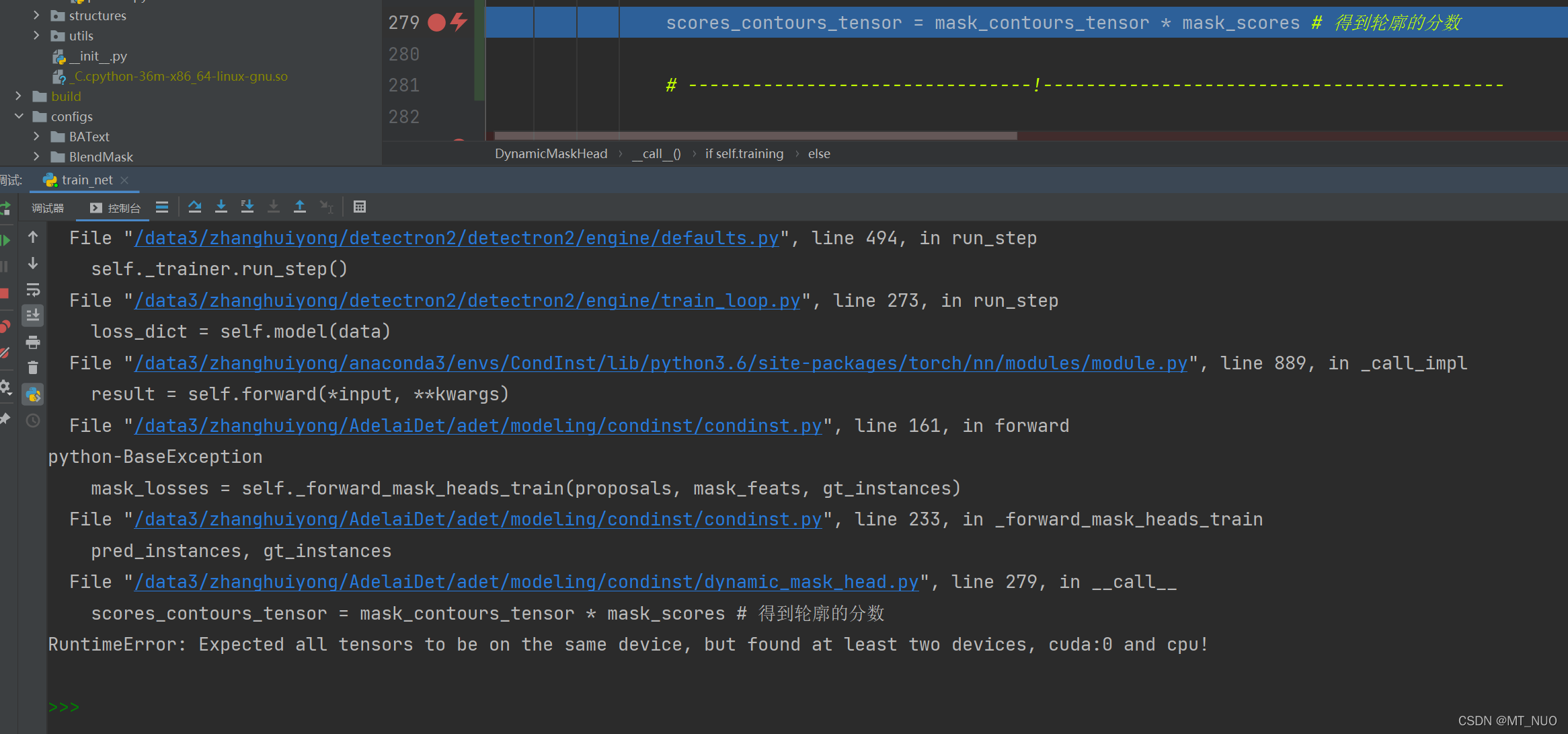
解决方案:
device = torch.device("cuda")
a = a.to(device) #指定设备


参考链接:
- 张量与数组运算报错(Use Tensor.cpu() to copy the tensor to host memory first;RuntimeError: Expected all tensors to be on the same device)
- Expected all tensors to be on the same device, but found at least two devices, cuda:0 and cpu!
问题2:OSError: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.27’ not found

Traceback (most recent call last):
File “test.py”, line 2, in
import open3d as o3d
File “/data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/site-packages/open3d/init.py”, line 56, in
_CDLL(str(next((_Path(file).parent / ‘cpu’).glob(‘pybind*’))))
File “/data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/ctypes/init.py”, line 348, in init
self._handle = _dlopen(self._name, mode)
OSError: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.27’ not found (required by /data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/site-packages/open3d/cpu/pybind.cpython-36m-x86_64-linux-gnu.so)
解决方案:
将open3d的安装版本改为 0.8,执行如下指令:
pip uninstall open3d
pip install open3d==0.8
参考链接:
- ImportError: /lib64/libm.so.6: version ‘GLIBC_2.27’ not found
- OSError: /lib/x86_64-linux-gnu/libm.so.6: version `GLIBC_2.27’ not found
问题3:RuntimeError: result type Float can’t be cast to the desired output type Long
参考链接:
- Pytorch: RuntimeError: result type Float can’t be cast to the desired output type Long
- Multi-label binary classification: result type Float can’t be cast to the desired output type Long
问题4:UnicodeDecodeError: ‘gbk’ codec can’t decode byte 0xb4 in position 178: illegal multibyte sequence

解决方案:
if you will open file with utf-8,then you need write:
open(file_name, 'r', encoding='UTF-8')
if you will open file with GBK,then you need do:
open(file_name, 'rb')
参考链接:
问题5:ValueError: could not convert string to float: ‘30.226,42.7354,1.90

Traceback (most recent call last):
File “exactFeature.py”, line 82, in
parts = loadSearch(‘./data_search’)
File “exactFeature.py”, line 16, in loadSearch
part = np.loadtxt(path, delimiter=’ ')
File “/data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/site-packages/numpy/lib/npyio.py”, line 1139, in loadtxt
for x in read_data(_loadtxt_chunksize):
File “/data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/site-packages/numpy/lib/npyio.py”, line 1067, in read_data
items = [conv(val) for (conv, val) in zip(converters, vals)]
File “/data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/site-packages/numpy/lib/npyio.py”, line 1067, in
items = [conv(val) for (conv, val) in zip(converters, vals)]
File “/data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/site-packages/numpy/lib/npyio.py”, line 763, in floatconv
return float(x)
ValueError: could not convert string to float: ‘30.226,42.7354,1.905’
参考链接:
问题6:Command “python setup.py egg_info” failed with error code 1 in C:\Users\xxx\pip-build-ecnk45nt\pywinpty\

解决方案:
更新插件
python -m pip install --upgrade setupTools
python -m pip install --upgrade pip
参考链接:
问题7:Failed building wheel for numba
Failed building wheel for numba
RuntimeError: Could not find allvm-configbinary. There are a number of reasons this could occur,
Failed building wheel for llvmlite
RuntimeError: Could not find allvm-configbinary. There are a number of reasons this could occur
Command “/data3/zhanghuiyong/anaconda3/envs/torch/bin/python -u -c “import setuptools, tokenize;file=‘/tmp/pip-build-s9czqwfi/llvmlite/setup.py’;f=getattr(tokenize, ‘open’, open)(file);code=f.read().replace(‘\r\n’, ‘\n’);f.close();exec(compile(code, file, ‘exec’))” install --record /tmp/pip-7rz1woww-record/install-record.txt --single-version-externally-managed --compile” failed with error code 1 in /tmp/pip-build-s9czqwfi/llvmlite/

解决方案:
升级 pip 版本
pip install --upgrade pip



参考链接:
问题8:AttributeError: ‘numpy.float64’ object has no attribute ‘detach’

解决方法:
需要将变量转为 Tensor 类型。
问题9: Error in `python’: free(): invalid pointer: 0x000055ca0b8d2e08
*** Error in `python’: free(): invalid pointer: 0x000055ca0b8d2e08 ***
======= Backtrace: =========
/lib/x86_64-linux-gnu/libc.so.6(+0x777f5)[0x7f44e4dd37f5]
/lib/x86_64-linux-gnu/libc.so.6(+0x8038a)[0x7f44e4ddc38a]
/lib/x86_64-linux-gnu/libc.so.6(cfree+0x4c)[0x7f44e4de058c]
…
…
/PointAugment/lib/python3.6/lib-dynload/_lzma.cpython-36m-x86_64-linux-gnu.so
7f35c511b000-7f35c511e000 r-xp 00003000 08:11 58079482 /data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/lib-dynload/_lzma.cpython-36m-x86_64-linux-gnu.so
7f35c511e000-7f35c511f000 r–p 00006000 08:11 58079482 /data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/lib-dynload/_lzma.cpython-36m-x86_64-linux-gnu.so
7f35c511f000-7f35c5120000 —p 00007000 08:11 58079482 /data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/lib-dynload/_lzma.cpython-36m-x86_64-linux-gnu.so
7f35c5120000-7f35c5121000 r–p 00007000 08:11 58079482 /data/xinjianjia/anaconda3/envs/PointAugment/lib/python3.6/lib-dynload/_lzma.cpython-36m-x86_64-linux-gnu.soAborted (core dumped)


解决方案:
需要将import open3d as o3d 的顺序放在 import torch 之前。

问题10:AssertionError: Checkpoint detectron2://ImageNetPretrained/MSRA/R-101.pkl not found!
Traceback (most recent call last):
File “tools/train_net.py”, line 225, in
args=(args,),
File “/data3/zhanghuiyong/detectron2-0.2.1/detectron2/engine/launch.py”, line 62, in launch
main_func(*args)
File “tools/train_net.py”, line 208, in main
trainer.resume_or_load(resume=args.resume)
File “/data3/zhanghuiyong/detectron2-0.2.1/detectron2/engine/defaults.py”, line 311, in resume__load
checkpoint = self.checkpointer.resume_or_load(self.cfg.MODEL.WEIGHTS, resume=resume)
File “/data3/zhanghuiyong/anaconda3/envs/SOTR/lib/python3.6/site-packages/fvcore/common/checkpot.py”, line 227, in resume_or_load
return self.load(path, checkpointables=[])
File “/data3/zhanghuiyong/anaconda3/envs/SOTR/lib/python3.6/site-packages/fvcore/common/checkpot.py”, line 153, in load
assert os.path.isfile(path), “Checkpoint {} not found!”.format(path)
AssertionError: Checkpoint detectron2://ImageNetPretrained/MSRA/R-101.pkl not found!

解决方案:
修改配置文件,将WEIGHTS:这一行的路径改为自己下载的权重文件路径。



问题11:Input type (torch.cuda.DoubleTensor) and weight type (torch.cuda.FloatTensor) should be the same
解决方案:
concat时,指定tensor的位置和类别与目标tensor一致。 i.e data.to(device=device, dtype=torch.float)
参考链接:
问题12:TypeError: ‘<’ not supported between instances of ‘State’ and ‘State’ heapq.heappush(pq, State(nextX, nextY, effortToNextNode))
解决方案:
Python中的heapq模块无法比较自定义类型的对象。在这种情况下,需要在自定义的State类中定义“小于”操作符(lt()方法),以便heapq可以正确地比较它们并进行堆排序。
class State:
def __init__(self, x, y, effortToNextNode):
self.x = x
self.y = y
self.effortToNextNode = effortToNextNode
def __lt__(self, other):
return self.effortToNextNode < other.effortToNextNode
其中,定义了一个“小于”操作符,使得堆队列按照effortToNextNode属性的值进行排序。在push时传递两个State对象,并且将按照他们的effortToNextNode属性进行排序。
问题13:AttributeError: module ‘distutils’ has no attribute ‘version’
setuptools版本问题。
解决方案
pip uninstall setuptools
pip install setuptools==59.5.0
问题14: AttributeError: module ‘numpy’ has no attribute ‘bool’?
downgrade numpy
解决方案
python -m pip uninstall numpy
python -m pip install numpy==1.23.1
问题15:ERROR: Could not install packages due to an OSError: [Errno 28] No space left on device
服务器 /tmp 空间不足,非Root用户,在自己的根目录建一个tmp目录
解决方案:
$ cd ~
$ mkdir tmp
$ export TMPDIR=$HOME/tmp
参考链接:
问题16:Input type (torch.FloatTensor) and weight type (torch.cuda.FloatTensor) should be the same
原因:
tensor.to() 这个函数功能是产生一个新的tensor,并不会改变原数据。
方法:
inputs.to(device) -> inputs = inputs.to(device)
参考链接:
【已解决】Input type (torch.FloatTensor) and weight type (torch.cuda.FloatTensor) should be the same














 3318
3318











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









