







PCL结合QT5开发
前言
在上一篇PCL安装与使用 介绍PCL简单使用过程,那么想在QT5项目中使用PCL项目模块该如何做呢!
1. 安装QT5
在mac系统下使用brew安装:
brew install qt@5
在mac系统下自动安装到/usr/local/Caller下面,导出qt相关的环境变量如下:
QT_HOME=/usr/local/Cellar/qt@5/5.15.3
exportPATH=$PATH:$QT_HOME/bin
同理ubuntu下可通过apt命令来对qt5进行安装。
2. 构建环境
在上文中我们添加了PCL的基本环境,修改其CMakeLists.txt文件,填写一下内容:
cmake_minimum_required(VERSION 3.23)
project(pcl-demo)
set(CMAKE_INCLUDE_CURRENT_DIR ON)
set(CMAKE_CXX_STANDARD_REQUIRED ON)
set(CMAKE_AUTOMOC ON)
set(CMAKE_AUTORCC ON)
# 引入QT框架 保证QT可以被CMaka搜索得到
set(CMAKE_PREFIX_PATH /usr/local/Cellar/qt@5/5.15.3/lib/cmake)
# 找到包PCL,引入模块visualization,io等模块,注意visualization模块可以自动将QT包含尽量,
find_package(PCL 1.3 REQUIRED COMPONENTS common io visualization filters)
message(STATUS "PCL_DIR = ${PCL_DIR}")
message(STATUS "PCL_INCLUDE_DIRS = ${PCL_INCLUDE_DIRS}")
message(STATUS "PCL_LIBS = ${PCL_LIBRARIES}")
message(STATUS "PCL_LIBRARY_DIRS = ${PCL_LIBRARY_DIRS}")
message(STATUS "PCL_VERSION = ${PCL_VERSION}")
message(STATUS "PCL_COMPONENTS = ${PCL_COMMON_LIBRARIES}")
add_definitions(${PCL_DEFINITIONS})
link_directories(${PCL_LIBRARY_DIRS})
include_directories(${PCL_INCLUDE_DIRS})
# 引入glog 框架
find_package(glog 0.6.0 REQUIRED)
# 引入 GTest 测试框架
include_directories(gtest/include)
link_directories(lib/gtest)
include_directories(src/main src/main/qt)
# 设置库函数的版本为 C++14
set(CMAKE_CXX_STANDARD 14)
# 搜索源文件
FILE(GLOB SRC *.cpp src/test/*.cpp src/main/*.cpp src/main/qt/*.cpp)
message(File Name:"${SRC}")
add_executable(${PROJECT_NAME} ${SRC})
target_link_libraries(${PROJECT_NAME} ${PCL_LIBRARIES} libgtest.a glog::glog)
将CMakeLists.txt修改完成后,通过cmake . 命令来进行构建项目。
3. QT界面
新建pclview.ui 界面通过QT designer对页面进行一个设计。打开后可以进行组件化的设计。如图所示:
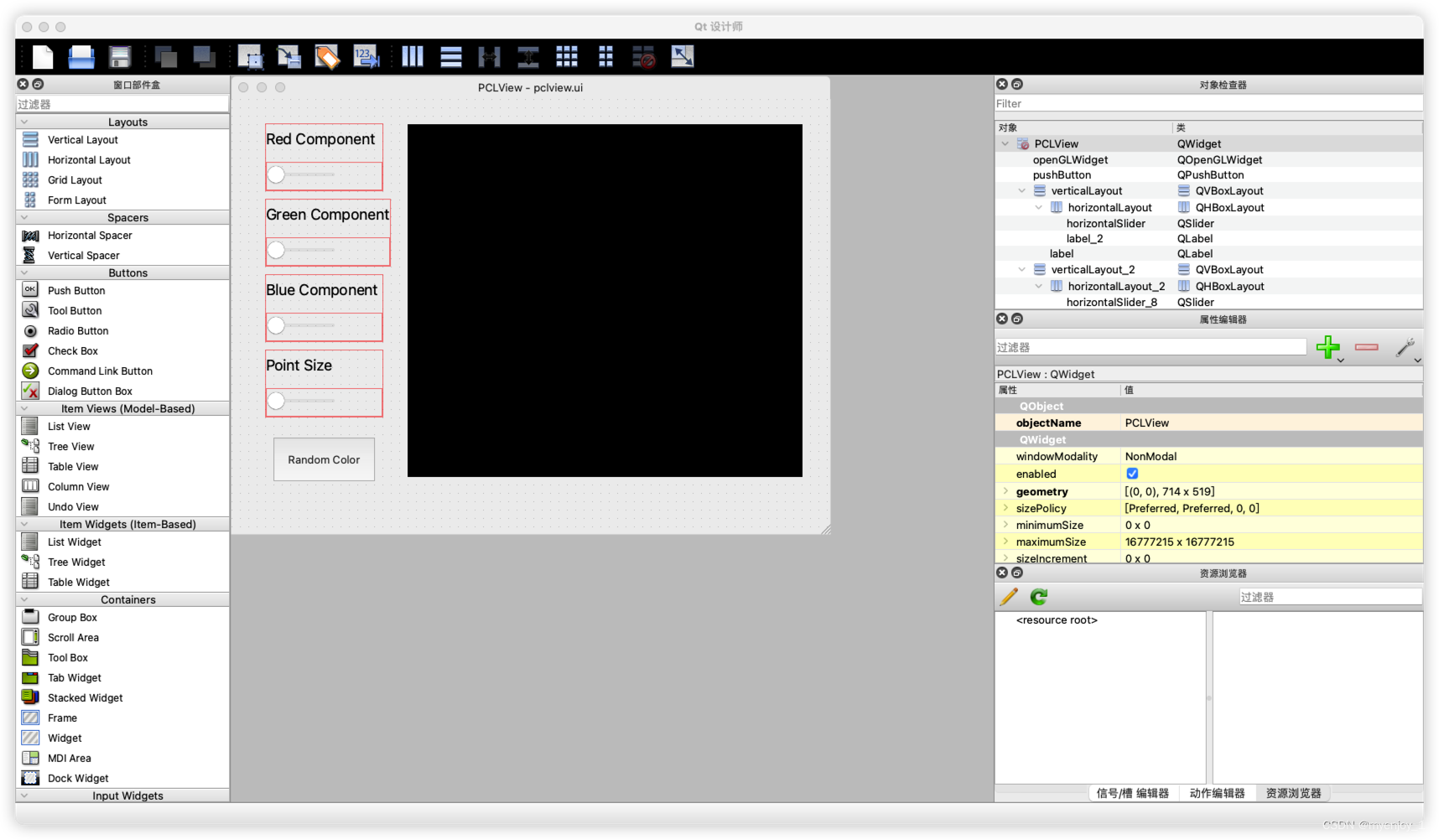
其他中间那一块是组件OpenGL Widget 组件,因为PCL也是通过OpenGL来进行绘画的。
在命令行里面执行命令:
uic pclview.ui -o PclViewer.h
其自动生成UI相关组件的代码。
4.创建界面窗口
在生成UI界面之后,我们可以通过组合的方式讲UI界面引入我们的逻辑处理中去,如下:
//
// Created by admin on 2023/1/30.
//
#ifndef PCL_DEMO_PCLVIEWER_H
#define PCL_DEMO_PCLVIEWER_H
#include <iostream>
// Qt
#include <QMainWindow>
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/visualization/pcl_visualizer.h>
// Visualization Toolkit (VTK)
#include <vtkRenderWindow.h>
#include "UI_PclViewer.h"
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloudT;
namespace UI{
class PclViewer:public QMainWindow{
Q_OBJECT
public:
explicit PclViewer(QWidget * parent = nullptr);
~PclViewer() override;
void refreshView();
public Q_SLOTS:
void randomButtonPressed();
void loadFilePressed();
private:
Ui::PCLView *pclView;
void connectSign();
protected:
pcl::visualization::PCLVisualizer::Ptr visualizer;
PointCloudT ::Ptr pointCloud;
};
}
#endif //PCL_DEMO_PCLVIEWER_H
这里我们新建了一个UI主窗口类,继承于QT的QMainWindow,因此这是个界面。然后在类中持有PointCloud的指针变量以及PCLVisualizer的指针变量,并且声明一些槽函数,用来处理一些点击事件。
以下为实现类:
//
// Created by admin on 2023/1/30.
//
#include "PclViewer.h"
#include "glog/logging.h"
#if VTK_MAJOR_VERSION > 8
#include <vtkGenericOpenGLRenderWindow.h>
#endif
#include <memory>
#include <QFileDialog>
#include <pcl/io/pcd_io.h>
#include <pcl/io/ply_io.h>
#include <pcl/filters/filter.h>
UI::PclViewer::PclViewer(QWidget *parent) : QMainWindow(parent) {
this->pclView = new Ui::PCLView;
pclView->setupUi(this);
this->pointCloud = std::make_shared<PointCloudT>();
this->pointCloud->resize(500);
for (int i = 0; i < pointCloud->size(); ++i) {
this->pointCloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);
this->pointCloud->points[i].y = 1024* rand() /(RAND_MAX + 1.0f);
this->pointCloud->points[i].z = 1024 * rand() / (RAND_MAX + 1.0f);
}
#if VTK_MAJOR_VERSION > 8
auto renderer = vtkSmartPointer<vtkRenderer>::New();
auto renderWindow = vtkSmartPointer<vtkGenericOpenGLRenderWindow>::New();
renderWindow->AddRenderer(renderer);
this->visualizer = std::make_shared<pcl::visualization::PCLVisualizer>(renderer, renderWindow, "view", false);
this->pclView->openGLWidget->setRenderWindow(this->visualizer->getRenderWindow());
this->visualizer->setupInteractor(this->pclView->openGLWidget->interactor(), pclView->openGLWidget->renderWindow());
#else
this->visualizer = std::make_shared<pcl::visualization::PCLVisualizer>("view",false);
this->pclView->openGLWidget->setRenderWindow(this->visualizer->getRenderWindow());
this->visualizer->setupInteractor(this->pclView->openGLWidget->interactor(),pclView->openGLWidget->renderWindow());
#endif
pclView->openGLWidget->update();
visualizer->addPointCloud(this->pointCloud);
visualizer->resetCamera();
this->connectSign();
refreshView();
}
UI::PclViewer::~PclViewer() {
delete this->pclView;
}
void UI::PclViewer::randomButtonPressed() {
LOG(INFO) << "start click button";
}
void UI::PclViewer::connectSign() {
connect(this->pclView->pushButton, SIGNAL(clicked(bool)), this, SLOT(randomButtonPressed()));
connect(this->pclView->loadFileBtn, SIGNAL(clicked(bool)), this, SLOT(loadFilePressed()));
}
void UI::PclViewer::loadFilePressed() {
QString filename = QFileDialog::getOpenFileName(this, tr("Open point cloud"), "/home/",
tr("Point cloud data (*.pcd *.ply)"));
PCL_INFO("File chosen: %s\n", filename.toStdString().c_str());
PointCloudT::Ptr cloud(new PointCloudT);
if (filename.isEmpty()) return;
int status = 0;
if (filename.endsWith(".pcd", Qt::CaseInsensitive))
status = pcl::io::loadPCDFile(filename.toStdString(), *cloud);
else
status = pcl::io::loadPLYFile(filename.toStdString(), *cloud);
if (status != 0) {
LOG(ERROR) << "Error reading point cloud";
return;
}
if (cloud->is_dense) {
pcl::copyPointCloud(*cloud, *this->pointCloud);
} else {
PCL_WARN("Cloud is not dense! Non finite points will be removed\n");
std::vector<int> vec;
pcl::removeNaNFromPointCloud(*cloud, *pointCloud, vec);
}
this->visualizer->updatePointCloud(this->pointCloud);
this->visualizer->resetCamera();
refreshView();
}
void UI::PclViewer::refreshView() {
#if VTK_MAJOR_VERSION > 8
this->pclView->openGLWidget->renderWindow()->Render();
#else
this->pclView->openGLWidget->update();
#endif
}
上述实现先将本类的指针进行初始话,由于VTK 8以上和VTK8以下的API的变动有些大,所以这里采用条件编译的方式,来区分VTK8的版本大小。
5.编译运行
在完成页面类后,按照一般QT程序的逻辑,将本界面引入到main函数里面,如下:
#include <pcl/common/io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/cloud_viewer.h>
#include "PclViewer.h"
#include "QApplication"
int main(int argc, char **argv) {
QSurfaceFormat::setDefaultFormat(QVTKOpenGLStereoWidget::defaultFormat());
QApplication app(argc,argv);
UI::PclViewer pclViewer;
pclViewer.show();
return QApplication::exec();
}
之后就是编译运行了,通过cmake,以及make命令来编译该项目。其运行为如下:
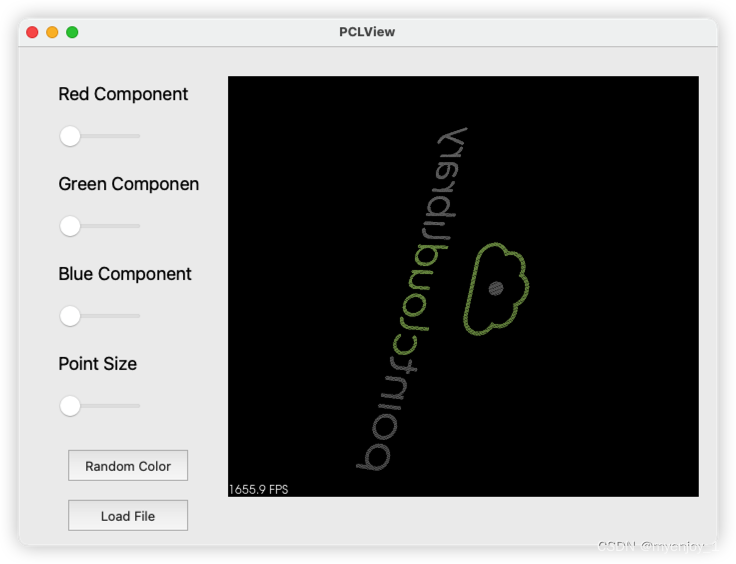
通过Load File按钮可以加载相关点云数据。

















 2169
2169











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











