







VINS-Mono笔记03_预积分
预积分理论
定义数学表示如下:
- ( ⋅ ) w (\cdot)^w (⋅)w表示世界坐标系(world frame)下的值, ( ⋅ ) b (\cdot)^b (⋅)b表示机器人坐标系(body frame)下的值, ( ⋅ ) c (\cdot)^c (⋅)c表示相机坐标系下的值.
- q b w \mathbf{q}^w_b qbw, p b w \mathbf{p}^w_b pbw表示从机器人坐标系到世界坐标系的的旋转.
- b k b_k bk表示第 k k k帧图像对应的机器人坐标, c k c_k ck表示第 k k k帧图像对应的相机坐标.
- ⊗ \otimes ⊗表示四元数乘法.
- g w = [ 0 , 0 , g ] T \mathbf{g}^w = [0,0,g]^T gw=[0,0,g]T表示世界坐标系下的重力加速度值.
- ( ⋅ ) ^ \hat{(\cdot)} (⋅)^表示物理量的测量值,即考虑噪声和零偏在内的值.
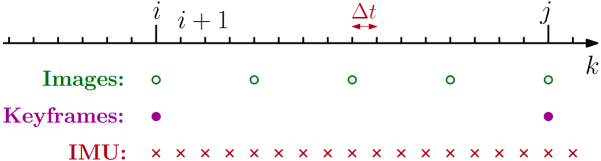
为什么需要预积分
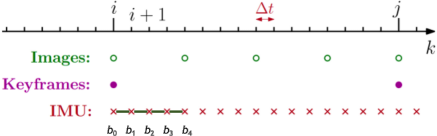
IMU频率和图像频率不同,一般IMU频率高于图像频率,因此需要将两图像帧之间的所有IMU数据积分起来,得到两图像帧间的IMU测量值.
IMU可以输出3轴角速度和3轴加速度,其数学方程如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \begin{split} …
- a t \mathbf{a}_t at和 ω t \boldsymbol{\omega}_t ωt表示真实值.
- a t ^ \hat{\mathbf{a}_t} at^和 ω ^ t \hat{\boldsymbol{\omega}}_t ω^t表示陀螺仪输出的测量值.
- b a t \mathbf{b}_{a_t} bat和 b w t \mathbf{b}_{w_t} bwt表示零偏.
- n a \mathbf{n}_a na和 n w \mathbf{n}_w nw表示噪声, n a ∼ N ( 0 , σ a 2 ) \mathbf{n}_a \sim \mathcal{N}(\mathbf{0},\boldsymbol{\sigma}_a^{2}) na∼N(0,σa2), n w ∼ N ( 0 , σ w 2 ) \mathbf{n}_w \sim \mathcal{N}(\mathbf{0},\boldsymbol{\sigma}_w^{2}) nw∼N(0,σw2).
- IMU在静止不动时,输出垂直向下的重力加速度值 g w \mathbf{g}^w gw.
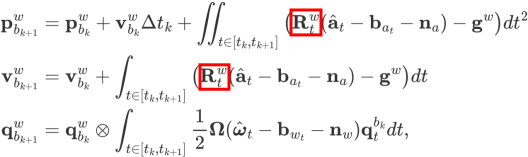
连续时间下对 b k b_k bk帧到 b k + 1 b_{k+1} bk+1帧间的IMU测量值做积分,得到的位置 p b k + 1 w \mathbf{p}^w_{b_{k+1}} pbk+1w、速度 v b k + 1 w \mathbf{v}^w_{b_{k+1}} vbk+1w和姿态 q b k + 1 w \mathbf{q }^{w}_{b_{k+1}} qbk+1w的表达式如下.
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \begin{split} …
其中
Ω
(
ω
)
\boldsymbol{\Omega}(\boldsymbol{\omega})
Ω(ω)和
⌊
ω
⌋
×
\lfloor \boldsymbol{\omega} \rfloor_{\times}
⌊ω⌋×的定义如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \begin{split} …
上式中位置
p
b
k
+
1
w
\mathbf{p}^w_{b_{k+1}}
pbk+1w和速度
v
b
k
+
1
w
\mathbf{v}^w_{b_{k+1}}
vbk+1w的积分容易理解:可以类比中学物理路程和速度针对加速度的积分;姿态
q
b
k
+
1
w
\mathbf{q }^{w}_{b_{k+1}}
qbk+1w的积分表达式的来源如下:
d
q
d
t
=
1
2
Ω
(
ω
)
q
\frac{d\mathbf{q}}{dt} = \frac{1}{2} \boldsymbol{\Omega}(\boldsymbol{\omega})\mathbf{q}
dtdq=21Ω(ω)q
即被积表达式本身是位置四元数
q
\mathbf{q}
q对时间
t
t
t的微分.
连续时间下的预积分
在上述连续时间位置 p b k + 1 w \mathbf{p}^w_{b_{k+1}} pbk+1w和速度 v b k + 1 w \mathbf{v}^w_{b_{k+1}} vbk+1w积分表达式中都用到了世界坐标系下的姿态 R t w \mathbf{R}^w_t Rtw(亦即 q t w \mathbf{q }^{w}_t qtw),这依赖于 b k b_k bk帧的姿态 R b k w \mathbf{R}^w_{b_k} Rbkw,一旦 b k b_k bk帧的姿态 R b k w \mathbf{R}^w_{b_k} Rbkw改变,就要重新积分,增大运算量.
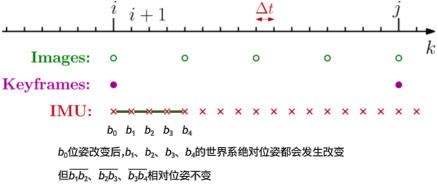
为防止重复积分的问题,将参考系转换至
b
k
b_k
bk帧,即在上式左右两端同时乘以
R
w
b
k
\mathbf{R}^{b_k}_w
Rwbk(亦即
q
w
b
k
\mathbf{q}^{b_k}_w
qwbk),得到
b
k
+
1
b_{k+1}
bk+1帧相对于
b
k
b_k
bk帧的位置
p
b
k
+
1
b
k
\mathbf{p}^{b_k}_{b_{k+1}}
pbk+1bk、速度
v
b
k
+
1
w
\mathbf{v}^w_{b_{k+1}}
vbk+1w和姿态
q
b
k
+
1
w
\mathbf{q }^{w}_{b_{k+1}}
qbk+1w的表达式如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \begin{split}\…
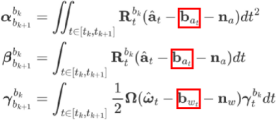
其中积分式
α
b
k
+
1
b
k
\boldsymbol{\alpha}^{b_k}_{b_{k+1}}
αbk+1bk、
β
b
k
+
1
b
k
\boldsymbol{\beta}^{b_k}_{b_{k+1}}
βbk+1bk和
γ
b
k
+
1
b
k
\boldsymbol{\gamma}^{b_k}_{b_{k+1}}
γbk+1bk被称为预积分量:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \label{eq:inte…
这样积分部分就只与IMU输出以及当前时刻相对于
b
k
b_k
bk帧的姿态
R
t
b
k
\mathbf{R}^{b_k}_{t}
Rtbk有关.
离散时间下的预积分
离散时间下,预积分量的估计值表达式如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \label{eq:prop…
实际编程中使用中值积分方式,也就是将上式中IMU测量值
a
^
i
\hat{\mathbf{a}}_i
a^i、
ω
^
i
\hat{\boldsymbol{\omega}}_i
ω^i用连续两帧的均值
a
^
i
+
a
^
i
+
1
2
\frac{\hat{\mathbf{a}}_i+\hat{\mathbf{a}}_{i+1}}{2}
2a^i+a^i+1、
ω
^
i
+
ω
^
i
+
1
2
\frac{\hat{\mathbf{\omega}}_i+\hat{\mathbf{\omega}}_{i+1}}{2}
2ω^i+ω^i+1代替.
在实际编程中 α ^ i b k \hat{\boldsymbol{\alpha}}^{b_k}_{i} α^ibk和 β ^ i b k \hat{\boldsymbol{\beta}}^{b_k}_{i} β^ibk被初始化为零矩阵, γ ^ i b k \hat{\boldsymbol{\gamma}}^{b_k}_{i} γ^ibk被初始化为单位矩阵.
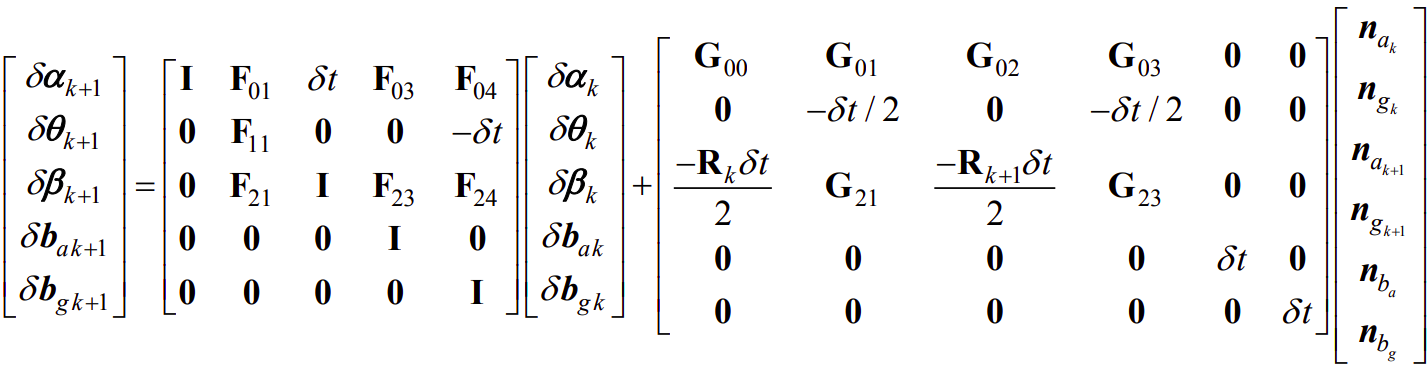
预积分量的协方差
使用误差卡尔曼滤波,可以得到连续时间下预积分量标准差的导数表达式如下:
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \begin{aligned…
将其离散化,再加上亿点点数学推导,可以得到:
数学不好太要命了,像我这样的人可能一辈子都理解不了这个推导过程了.有人专门写了一篇论文来推导VINS-Mono论文里的数学表达式,见Formula Derivation and Analysis of the VINS-Mono.
在一些情况下,陀螺仪零偏 b a t \mathbf{b}_{a_t} bat和 b w t \mathbf{b}_{w_t} bwt也是未知的,在这种情况下,VINS-Mono将陀螺仪零偏也作为待优化变量处理,这样就又带来了重复积分的问题:理论上每经过一次优化,零偏 b a t \mathbf{b}_{a_t} bat和 b w t \mathbf{b}_{w_t} bwt值发生改变后,就要重新积分计算预积分量 α b k + 1 b k \boldsymbol{\alpha}^{b_k}_{b_{k+1}} αbk+1bk、 β b k + 1 b k \boldsymbol{\beta}^{b_k}_{b_{k+1}} βbk+1bk和 γ b k + 1 b k \boldsymbol{\gamma}^{b_k}_{b_{k+1}} γbk+1bk:
为解决这一问题,对预积分量
α
b
k
+
1
b
k
\boldsymbol{\alpha}^{b_k}_{b_{k+1}}
αbk+1bk、
β
b
k
+
1
b
k
\boldsymbol{\beta}^{b_k}_{b_{k+1}}
βbk+1bk和
γ
b
k
+
1
b
k
\boldsymbol{\gamma}^{b_k}_{b_{k+1}}
γbk+1bk对于零偏
b
a
t
\mathbf{b}_{a_t}
bat和
b
w
t
\mathbf{b}_{w_t}
bwt做一阶泰勒展开,在零偏值变化不大时使用一阶微分估计变化量,避免重新做积分运算.同样地,因为我不会数学,其数学推导略.
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \label{eq:corr…
预积分代码实现
预积分类IntegrationBase
预积分类实现在vins_estimator包下src/factor/integration_base.h文件内的IntegrationBase类中.主要成员变量如下:
| 成员变量 | 数据类型 | 意义 |
|---|---|---|
linearized_acc | const Eigen::Vector3d | b 0 b_0 b0时刻(参与预积分的首个IMU帧)加速度测量值 a ^ 0 \hat{\mathbf{a}}_0 a^0 |
linearized_gyr | const Eigen::Vector3d | b 0 b_0 b0时刻(参与预积分的首个IMU帧)角速度测量值 ω ^ 0 \hat{\boldsymbol{\omega}}_0 ω^0 |
acc_0 | Eigen::Vector3d | b k b_k bk时刻加速度测量值 a ^ k \hat{\mathbf{a}}_k a^k |
acc_1 | Eigen::Vector3d | b k + 1 b_{k+1} bk+1时刻加速度测量值 a ^ k + 1 \hat{\mathbf{a}}_{k+1} a^k+1 |
gyr_0 | Eigen::Vector3d | b k b_k bk时刻角速度测量值 ω ^ k \hat{\boldsymbol{\omega}}_k ω^k |
gyr_1 | Eigen::Vector3d | b k + 1 b_{k+1} bk+1时刻角速度测量值 ω ^ k + 1 \hat{\boldsymbol{\omega}}_{k+1} ω^k+1 |
linearized_ba | Eigen::Vector3d | 加速度零偏 b a i \mathbf{b}_{a_i} bai |
linearized_bg | Eigen::Vector3d | 陀螺角速度零偏 b a i \mathbf{b}_{a_i} bai |
delta_p | Eigen::Vector3d | 预积分量 α i + 1 b k \boldsymbol{\alpha}^{b_k}_{i+1} αi+1bk |
delta_v | Eigen::Vector3d | 预积分量 β i + 1 b k \boldsymbol{\beta}^{b_k}_{i+1} βi+1bk |
delta_q | Eigen::Quaterniond | 预积分量 γ i + 1 b k \boldsymbol{\gamma}^{b_k}_{i+1} γi+1bk |
dt_buf | std::vector<double> | 存储所有帧间的 d t d_t dt |
acc_buf | std::vector<Eigen::Vector3d> | 存储所有帧的加速度测量值 a ^ i \hat{\mathbf{a}}_i a^i |
gyr_buf | std::vector<Eigen::Vector3d> | 存储所有帧的角速度测量值 ω ^ i \hat{\boldsymbol{\omega}}_i ω^i |
covariance | Eigen::Matrix<double, 15, 15> | 见下图 |
jacobian | Eigen::Matrix<double, 15, 15> | 见下图 |
noise | Eigen::Matrix<double, 18, 18> | 见下图 |

预积分类的成员函数
构造函数IntegrationBase::IntegrationBase()
α
^
i
b
k
\hat{\boldsymbol{\alpha}}^{b_k}_{i}
α^ibk和
β
^
i
b
k
\hat{\boldsymbol{\beta}}^{b_k}_{i}
β^ibk被初始化为零矩阵,
γ
^
i
b
k
\hat{\boldsymbol{\gamma}}^{b_k}_{i}
γ^ibk被初始化为单位矩阵;jacobian被初始化为单位矩阵,covariance被初始化为零矩阵,noise被初始化为单位矩阵乘以对应传感器的噪声方差(不确定度).
IntegrationBase(const Eigen::Vector3d &_acc_0,
const Eigen::Vector3d &_gyr_0,
const Eigen::Vector3d &_linearized_ba,
const Eigen::Vector3d &_linearized_bg) :
acc_0{_acc_0},
gyr_0{_gyr_0},
linearized_acc{_acc_0},
linearized_gyr{_gyr_0},
linearized_ba{_linearized_ba},
linearized_bg{_linearized_bg},
jacobian{Eigen::Matrix<double, 15, 15>::Identity()},
covariance{Eigen::Matrix<double, 15, 15>::Zero()},
sum_dt{0.0},
delta_p{Eigen::Vector3d::Zero()},
delta_q{Eigen::Quaterniond::Identity()},
delta_v{Eigen::Vector3d::Zero()} {
noise = Eigen::Matrix<double, 18, 18>::Zero();
noise.block<3, 3>(0, 0) = (ACC_N * ACC_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(3, 3) = (GYR_N * GYR_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(6, 6) = (ACC_N * ACC_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(9, 9) = (GYR_N * GYR_N) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(12, 12) = (ACC_W * ACC_W) * Eigen::Matrix3d::Identity();
noise.block<3, 3>(15, 15) = (GYR_W * GYR_W) * Eigen::Matrix3d::Identity();
}
传入IMU数据帧时调用IntegrationBase::push_back()进行预积分
每传入一IMU帧,调用一次push_back()函数,其内部调用midPointIntegration()函数进行中值预积分:
void push_back(double dt, const Eigen::Vector3d &acc, const Eigen::Vector3d &gyr) {
// 1.记录对应IMU帧测量值
dt_buf.push_back(dt);
acc_buf.push_back(acc);
gyr_buf.push_back(gyr);
// 2. IMU传播
propagate(dt, acc, gyr);
}
void propagate(double _dt, const Eigen::Vector3d &_acc_1, const Eigen::Vector3d &_gyr_1) {
// 1.记录本帧IMU帧测量值
dt = _dt;
acc_1 = _acc_1;
gyr_1 = _gyr_1;
Vector3d result_delta_p;
Quaterniond result_delta_q;
Vector3d result_delta_v;
Vector3d result_linearized_ba;
Vector3d result_linearized_bg;
// 2.中值预积分
midPointIntegration(_dt,
acc_0,
gyr_0,
_acc_1,
_gyr_1,
delta_p,
delta_q,
delta_v,
linearized_ba,
linearized_bg,
result_delta_p,
result_delta_q,
result_delta_v,
result_linearized_ba,
result_linearized_bg,
1);
// 3. 更新成员变量
delta_p = result_delta_p;
delta_q = result_delta_q;
delta_v = result_delta_v;
linearized_ba = result_linearized_ba;
linearized_bg = result_linearized_bg;
delta_q.normalize();
sum_dt += dt;
acc_0 = acc_1;
gyr_0 = gyr_1;
}
void midPointIntegration(double _dt,
const Eigen::Vector3d &_acc_0,
const Eigen::Vector3d &_gyr_0,
const Eigen::Vector3d &_acc_1,
const Eigen::Vector3d &_gyr_1,
const Eigen::Vector3d &delta_p,
const Eigen::Quaterniond &delta_q,
const Eigen::Vector3d &delta_v,
const Eigen::Vector3d &linearized_ba,
const Eigen::Vector3d &linearized_bg,
Eigen::Vector3d &result_delta_p,
Eigen::Quaterniond &result_delta_q,
Eigen::Vector3d &result_delta_v,
Eigen::Vector3d &result_linearized_ba,
Eigen::Vector3d &result_linearized_bg,
bool update_jacobian) {
// 1.计算预积分量
Vector3d un_acc_0 = delta_q * (_acc_0 - linearized_ba);
Vector3d un_gyr = 0.5 * (_gyr_0 + _gyr_1) - linearized_bg;
result_delta_q = delta_q * Quaterniond(1, un_gyr(0) * _dt / 2, un_gyr(1) * _dt / 2, un_gyr(2) * _dt / 2);
Vector3d un_acc_1 = result_delta_q * (_acc_1 - linearized_ba);
Vector3d un_acc = 0.5 * (un_acc_0 + un_acc_1);
result_delta_p = delta_p + delta_v * _dt + 0.5 * un_acc * _dt * _dt;
result_delta_v = delta_v + un_acc * _dt;
result_linearized_ba = linearized_ba;
result_linearized_bg = linearized_bg;
// 2.计算协方差
if (update_jacobian) {
Vector3d w_x = 0.5 * (_gyr_0 + _gyr_1) - linearized_bg;
Vector3d a_0_x = _acc_0 - linearized_ba;
Vector3d a_1_x = _acc_1 - linearized_ba;
Matrix3d R_w_x, R_a_0_x, R_a_1_x;
R_w_x << 0, -w_x(2), w_x(1), w_x(2), 0, -w_x(0), -w_x(1), w_x(0), 0;
R_a_0_x << 0, -a_0_x(2), a_0_x(1), a_0_x(2), 0, -a_0_x(0), -a_0_x(1), a_0_x(0), 0;
R_a_1_x << 0, -a_1_x(2), a_1_x(1), a_1_x(2), 0, -a_1_x(0), -a_1_x(1), a_1_x(0), 0;
// 2.1. 计算矩阵F
MatrixXd F = MatrixXd::Zero(15, 15);
F.block<3, 3>(0, 0) = Matrix3d::Identity();
F.block<3, 3>(0, 3) = -0.25 * delta_q.toRotationMatrix() * R_a_0_x * _dt * _dt
+ -0.25 * result_delta_q.toRotationMatrix() * R_a_1_x * (Matrix3d::Identity() - R_w_x * _dt) * _dt * _dt;
F.block<3, 3>(0, 6) = MatrixXd::Identity(3, 3) * _dt;
F.block<3, 3>(0, 9) = -0.25 * (delta_q.toRotationMatrix() + result_delta_q.toRotationMatrix()) * _dt * _dt;
F.block<3, 3>(0, 12) = -0.25 * result_delta_q.toRotationMatrix() * R_a_1_x * _dt * _dt * -_dt;
F.block<3, 3>(3, 3) = Matrix3d::Identity() - R_w_x * _dt;
F.block<3, 3>(3, 12) = -1.0 * MatrixXd::Identity(3, 3) * _dt;
F.block<3, 3>(6, 3) = -0.5 * delta_q.toRotationMatrix() * R_a_0_x * _dt
+ -0.5 * result_delta_q.toRotationMatrix() * R_a_1_x * (Matrix3d::Identity() - R_w_x * _dt) * _dt;
F.block<3, 3>(6, 6) = Matrix3d::Identity();
F.block<3, 3>(6, 9) = -0.5 * (delta_q.toRotationMatrix() + result_delta_q.toRotationMatrix()) * _dt;
F.block<3, 3>(6, 12) = -0.5 * result_delta_q.toRotationMatrix() * R_a_1_x * _dt * -_dt;
F.block<3, 3>(9, 9) = Matrix3d::Identity();
F.block<3, 3>(12, 12) = Matrix3d::Identity();
// 2.2. 计算矩阵V
MatrixXd V = MatrixXd::Zero(15, 18);
V.block<3, 3>(0, 0) = 0.25 * delta_q.toRotationMatrix() * _dt * _dt;
V.block<3, 3>(0, 3) = 0.25 * -result_delta_q.toRotationMatrix() * R_a_1_x * _dt * _dt * 0.5 * _dt;
V.block<3, 3>(0, 6) = 0.25 * result_delta_q.toRotationMatrix() * _dt * _dt;
V.block<3, 3>(0, 9) = V.block<3, 3>(0, 3);
V.block<3, 3>(3, 3) = 0.5 * MatrixXd::Identity(3, 3) * _dt;
V.block<3, 3>(3, 9) = 0.5 * MatrixXd::Identity(3, 3) * _dt;
V.block<3, 3>(6, 0) = 0.5 * delta_q.toRotationMatrix() * _dt;
V.block<3, 3>(6, 3) = 0.5 * -result_delta_q.toRotationMatrix() * R_a_1_x * _dt * 0.5 * _dt;
V.block<3, 3>(6, 6) = 0.5 * result_delta_q.toRotationMatrix() * _dt;
V.block<3, 3>(6, 9) = V.block<3, 3>(6, 3);
V.block<3, 3>(9, 12) = MatrixXd::Identity(3, 3) * _dt;
V.block<3, 3>(12, 15) = MatrixXd::Identity(3, 3) * _dt;
// 2.3. 更新jacobian和covariance
jacobian = F * jacobian;
covariance = F * covariance * F.transpose() + V * noise * V.transpose();
}
}
零偏改变时调用IntegrationBase::repropagate()重新积分
零偏改变较大时调用repropagate()进行重新积分,其内部对xxx_buf中的每一帧数据调用propagate().
void repropagate(const Eigen::Vector3d &_linearized_ba, const Eigen::Vector3d &_linearized_bg) {
// 1. 重新初始化成员变量
sum_dt = 0.0;
acc_0 = linearized_acc;
gyr_0 = linearized_gyr;
delta_p.setZero();
delta_q.setIdentity();
delta_v.setZero();
linearized_ba = _linearized_ba;
linearized_bg = _linearized_bg;
jacobian.setIdentity();
covariance.setZero();
// 2. 逐帧积分
for (int i = 0; i < static_cast<int>(dt_buf.size()); i++) {
propagate(dt_buf[i], acc_buf[i], gyr_buf[i]);
}
}
优化过程中调用IntegrationBase::evaluate()计算IMU残差
Eigen::Matrix<double, 15, 1> evaluate(const Eigen::Vector3d &Pi,
const Eigen::Quaterniond &Qi,
const Eigen::Vector3d &Vi,
const Eigen::Vector3d &Bai,
const Eigen::Vector3d &Bgi,
const Eigen::Vector3d &Pj,
const Eigen::Quaterniond &Qj,
const Eigen::Vector3d &Vj,
const Eigen::Vector3d &Baj,
const Eigen::Vector3d &Bgj) {
Eigen::Matrix<double, 15, 1> residuals;
//其中各增量关于 bias 的 Jacobian 可从公式(16)的大 Jacobian 中的相应位置获得。
Eigen::Matrix3d dp_dba = jacobian.block<3, 3>(O_P, O_BA);
Eigen::Matrix3d dp_dbg = jacobian.block<3, 3>(O_P, O_BG);
Eigen::Matrix3d dq_dbg = jacobian.block<3, 3>(O_R, O_BG);
Eigen::Matrix3d dv_dba = jacobian.block<3, 3>(O_V, O_BA);
Eigen::Matrix3d dv_dbg = jacobian.block<3, 3>(O_V, O_BG);
//当每次迭代时,我们得到一个新的 bias,又得根据公式(5)重新对第 k 帧和第 k+1 帧之间的 IMU 预积分,非常耗时。这里假设预积分的变化量与 bias 是线性关系,可以写成:
Eigen::Vector3d dba = Bai - linearized_ba;
Eigen::Vector3d dbg = Bgi - linearized_bg;
Eigen::Quaterniond corrected_delta_q = delta_q * Utility::deltaQ(dq_dbg * dbg);
Eigen::Vector3d corrected_delta_v = delta_v + dv_dba * dba + dv_dbg * dbg;
Eigen::Vector3d corrected_delta_p = delta_p + dp_dba * dba + dp_dbg * dbg;
residuals.block<3, 1>(O_P, 0) =
Qi.inverse() * (0.5 * G * sum_dt * sum_dt + Pj - Pi - Vi * sum_dt) - corrected_delta_p;
residuals.block<3, 1>(O_R, 0) = 2 * (corrected_delta_q.inverse() * (Qi.inverse() * Qj)).vec();
residuals.block<3, 1>(O_V, 0) = Qi.inverse() * (G * sum_dt + Vj - Vi) - corrected_delta_v;
residuals.block<3, 1>(O_BA, 0) = Baj - Bai;
residuals.block<3, 1>(O_BG, 0) = Bgj - Bgi;
return residuals;
}














 356
356











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









