




接 上篇。
1 滤波问题中的IMU积分
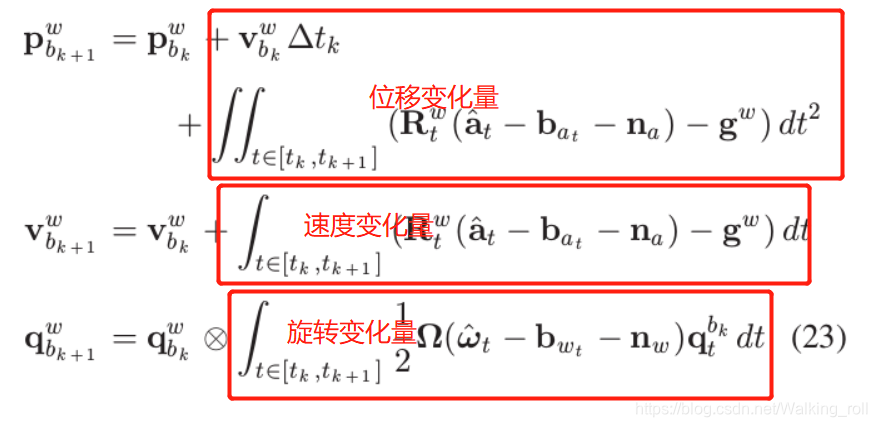
我们知道上式中的IMU积分分别表示位移的变化量、速度的变化量和旋转的变化量,在滤波问题中,用已知的上一帧帧的状态加上对IMU测量的积分量可以预测当前帧的状态,这就是滤波器中的预测部份,而更新通常是通过最小化重投影误差来完成。在非线性优化中,会同时优化好几帧的位姿状态,此时再用IMU积分来进行优化就不是很好了。为什么呢?
滤波只进行相邻帧的一次预测和更新,而非线性优化是相当于在优化过程中同时调整好几帧的状态量,使其能在调整的位姿下重投影误差最小。如果帧间是用积分联系起来的话,某帧姿态调整时,其后的所有帧的位姿都要通过积分重新算一遍。如果大规模优化的话,显然计算量极大。

对于优化问题,采用IMU预积分技术可以大大降低计算工作量。
2 IMU预积分引出
关于预积分的论文
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1019
1019

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











