






目 录
1 绪论 1
1.1 机械手的概述 1
1.2 机械手的发展史 1
1.3 气动技术及气动机械手的发展过程 2
1.4 机械手未来的发展趋势 3
1.5 本课题研究内容 4
1.6 课题研究的意义 4
2 机械手的总体设计方案 6
2.1 机械手的工作原理及系统组成 6
2.2 机械手基本形式的选择 7
2.3 驱动机构的选择 8
2.4 机械手详细设计参数 8
2.5 本章小结 8
3 机械手手部结构设计及计算 9
3.1 手部结构 9
3.2 机械手手爪设计计算 9
3.3 夹紧气缸的设计 11
3.4 手爪夹持范围计算 13
3.5 机械手手爪夹持精度的分析计算 14
3.6 弹簧的设计计算 15
3.7 本章小结 17
4 腕部的设计计算 18
4.1 腕部设计的基本要求 18
4.2 腕部的结构以及选择 18
4.3 腕部的驱动力矩计算 19
4.4 腕部工作压力的计算 20
4.5 气压缸盖螺钉的计算 21
4.6 动片和输出轴间的连接螺钉 22
4.7 本章小结 23
5 机械手手臂机构的设计 24
5.1 手臂的设计要求 24
5.2 伸缩气压缸的设计 24
5.3 导向装置 28
5.4 本章小结 28
6 机械手腰部和基座结构设计及计算 29
6.1 结构设计 29
6.2 控制手臂上下移动的腰部气缸的设计 29
6.3 导向装置 32
6.4 平衡装置 32
6.5 机身回转机构的计算 32
6.6 本章小结 33
7 机械手的PLC控制系统设计 34
7.1 气压传动系统工作原理图 34
7.2 可编程序控制器的选择及工作过程 35
7.3 可编程序控制器的使用步骤 35
7.4 机械手可编程序控制器控制方案 36
7.5 本章小结 46
8 结论 47
参考文献 48
致谢 49
3 机械手手部结构设计及计算
3.1 手部结构
四自由度气动机械手采用夹持式手部结构,由手爪和传力机构所组成。其传力结构形式多样,有楔块杠杆式、滑槽杠杆式、连杆杠杆式、齿轮齿条平行连杆式、左右旋丝杠平移型[10],本设计采用滑槽杠杆式的传力机构。
3.1.1 端执行器的要求
(1)不论是夹持或是吸附,末端执行器需具有满足作业要求的足够的夹持力和所需的夹持位置精度。
(2)应尽可能使末端执行器结构简单,紧凑、重量轻,以减轻手臂的负荷。专用的末端执行器机构简单,工作效率高,而能完成多种作业的万能末端执行器可能具有结构复杂、费用昂贵的缺点,因此提倡设计可快速更换的系列化、通用化专用末端执行器[10]。
3.1.2 手爪的分类和选取
工业机器人中应用的机械式夹持器多为双指手爪式,按其手爪的运动方式可分为平移型和回转型。回转型手爪又可分为单支点回转和双支点回转型,按夹持方式可分为外夹式和内撑式,按驱动方式有电动、液压和气动三种。
回转型夹持器结构较简单,但当所夹持的工件直径有变化时,将引起工件的轴心偏移。这个偏移量称为夹持误差。
平移型夹持器,工件直径的变化不影响其轴心的位置,但其架构复杂,体积大,制造精度要求高。
当设计机械式夹持器式,在满足工件定位精度要求的条件下,尽可能采用结构较简单的回转型夹持器。[10]
结合机械手设计任务书中要求:手爪开合角为60度,且能够抓取重约1kg的圆柱形铁质工件。所以本设计采用双支点回转型滑槽杠杆式手爪。
3.2 机械手手爪设计计算
3.2.1 手爪的力学分析
下面对其基本结构进行力学分析:滑槽杠杆,如图3-1为常见的滑槽杠杆式手部结构。
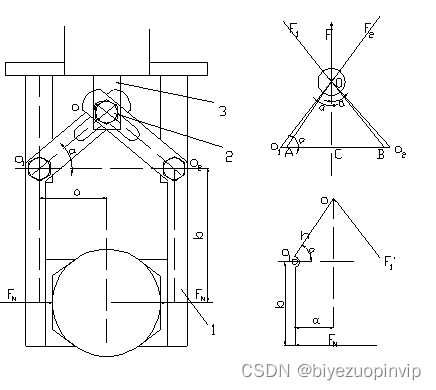
图3-1 滑槽杠杆式手部结构、受力分析
1——手指 2——销轴 3——杠杆































 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









