






扫地机器人路径规划问题,算法是全覆盖内螺旋算法,使用MATLAB实现,下列为运行图过程截图
YID:3969628561971867
哇哦哇哦

扫地机器人路径规划问题是一个重要的技术挑战,而采用全覆盖内螺旋算法能够有效解决这个问题。本文介绍了一个使用MATLAB实现的扫地机器人仿真程序,并对程序进行了详细的分析。
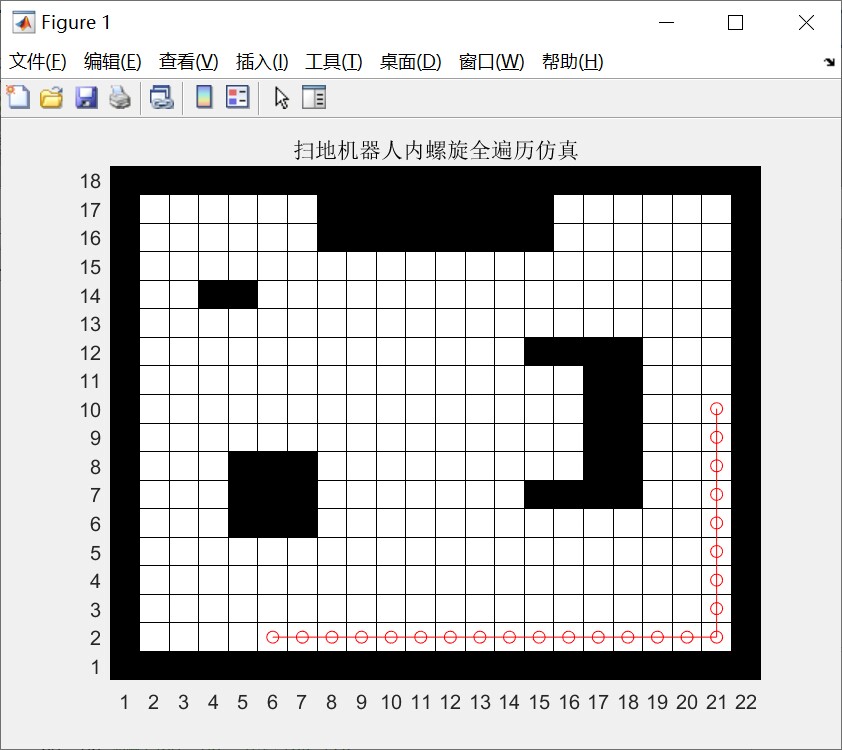
首先,程序创建了一个22x18大小的房间地图,用二维数组表示。每个元素表示一个栅格,初始值为1,表示可清扫的区域。程序还录入了障碍物的位置,并将这些位置的栅格值设为0,表示障碍物。
接下来,程序生成了房间的栅格地图,并在图形界面上显示出来。黑色表示障碍物,白色表示可清扫的区域。
程序定义了一些变量,如起点位置(m,n)、机器人的运动状态、机器人的四种运动方式等。
程序的主循环是一个while循环,条件是finish为1,表示清扫未完成。在循环中,根据机器人的运动状态,判断下一步的动作。如果右侧有空格,则向右转;如果前方有障碍物或已清扫的区域,则向左转;否则向前推进。
当机器人陷入死区或清扫完成时,进入一个内循环。内循环中,机器人会找到距当前位置最近的待清扫栅格,并规划出最短路径。机器人以当前位置为中心,一层一层往外扩散,查找栅格值为1的栅格位置。通过检查上下行和左右列,找到最近的待清扫栅格的位置。
如果没有找到待清扫栅格,则说明机器人已完成清扫,程序结束。否则,机器人根据最短路径移动到目标位置,并将目标位置的栅格值设为2,表示已清扫。
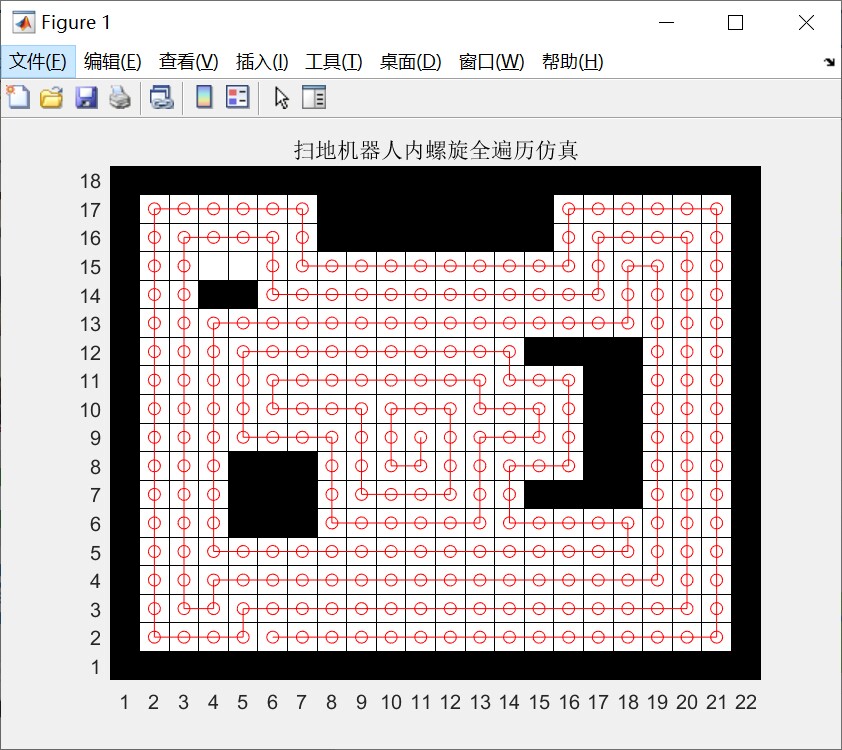
最后,程序在图形界面上显示机器人的移动路径,并通过pause函数暂停0.05秒,以便观察清扫过程。
需要注意的是,程序中还有一部分注释掉的代码,这部分代码是使用A算法寻找最短路径的部分。根据程序的逻辑,当机器人陷入死区或清扫完成时,会调用这部分代码进行路径规划。但是由于注释掉了,所以实际上并没有使用A算法。
这个程序主要是为了模拟扫地机器人在房间内清扫的过程。它涉及到的知识点包括二维数组的使用、条件判断、循环、图形界面的显示等。通过这个程序,可以了解到机器人在清扫过程中的运动策略和路径规划的思路。
总结起来,扫地机器人路径规划问题是一个复杂的问题,但是采用全覆盖内螺旋算法能够有效解决。本文介绍了一个使用MATLAB实现的扫地机器人仿真程序,详细分析了程序的实现逻辑和运行过程。通过这个程序,可以更好地理解扫地机器人的清扫策略和路径规划思路。希望对读者有所帮助。
相关的代码,程序地址如下:http://imgcs.cn/628561971867.html
















 1233
1233

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









