






提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
前言
TJA1042高速CAN收发器提供了控制器局域网(CAN)协议控制器和物理双线CAN总线之间的接口。该收发器是为汽车工业中的高速CAN应用而设计的,为(具有CAN协议控制器的微控制器)提供差分传输和接收能力。TJA1042属于NXP半导体公司的第三代高速CAN收发器,比TJA1040等第一代和第二代设备提供了显著的改进。它提供了改进的电磁兼容性(EMC)和静电放电(ESD)性能。
一、芯片简介
芯片有两种不同型号,不同型号5脚定义不同,设计或调试时一定要看好后缀。
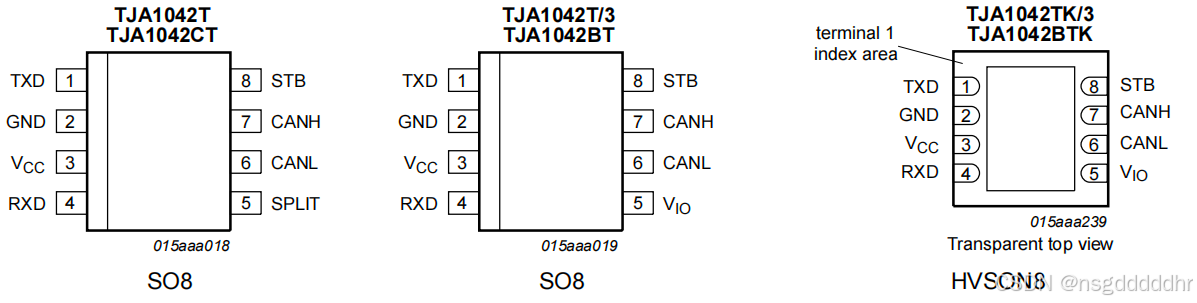
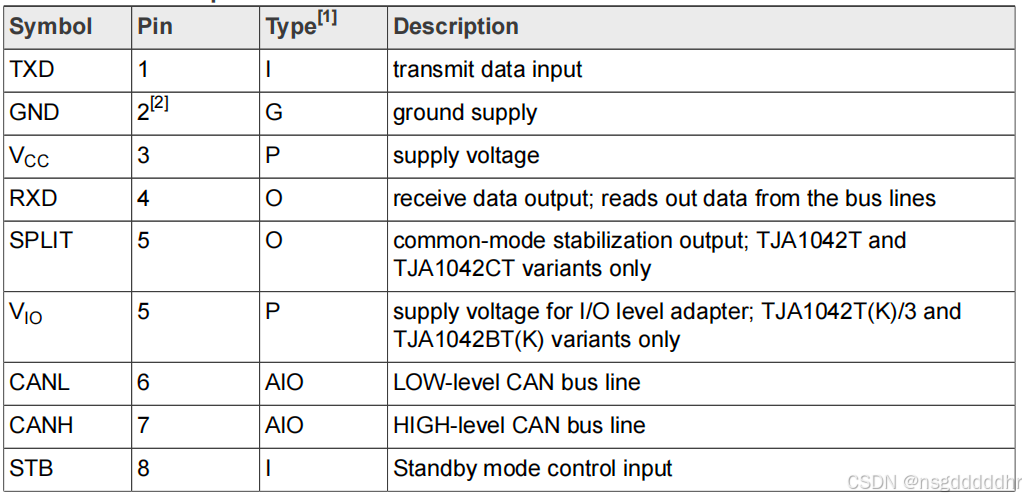
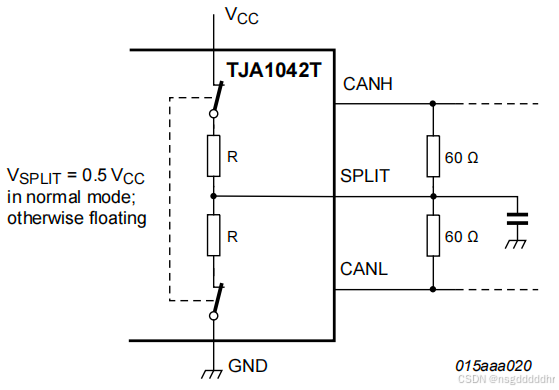
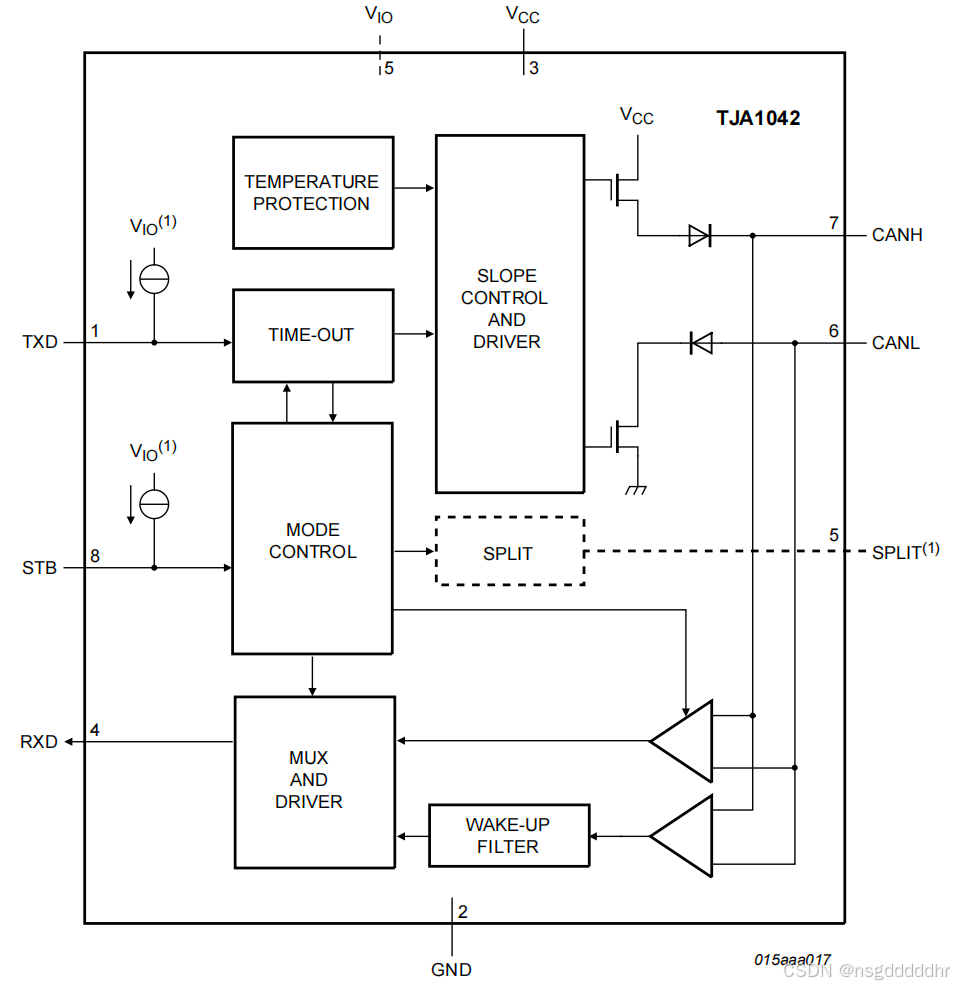
其他引脚功能不过多描述,STB脚用于控制芯片进入待机模式,高电平有效。VIO脚用于匹配CAN总线电压和MCU的I/O口电压。SPLIT引脚为CAN总线提供0.5倍VCC的共模电压,同时可减少电磁辐射。
二、调试注意
每个人用的CAN工具不同,但总的来讲有以下几点需要注意:
1.STB脚
STB脚不能悬空。STB脚芯片内部有上拉,悬空会使芯片一直处于待机模式。
2.VIO脚
VIO脚必须供电,不然实测无法通讯,引脚电平一直跳变。
3.120欧姆电阻
源端和终端都要加120欧姆电阻,这样用万用表测CANH和CANL之间的电阻应该是60欧姆。
4.TXD和RXD
TXD和RXD上不能串过大的电阻,不串电阻也可通讯。
5.待机模式
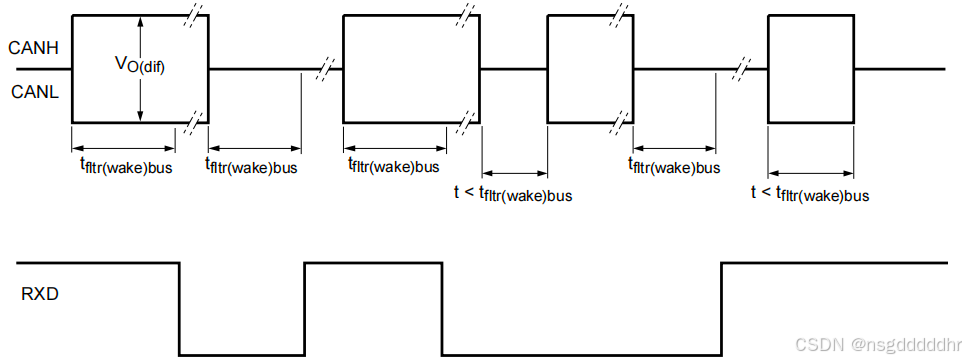
TJA1042可以进入待机模式,并支持任意帧唤醒。在待机模式下,总线上是低电平,以最小化系统供电电流。低功率接收器由VIO提供,即使VIO是唯一可用的电源电压,它也能够检测CAN总线活动。待机后直到STB拉高之前,不会过渡到正常模式。
RXD在待机模式下为高电平,只有持续时间比5us更长的总线主导状态和总线隐性状态才反映在引脚RXD上。
一般流程是MCU先拉高STB使CAN芯片进入待机模式。唤醒帧来到时,RXD拉低,MCU的RXD引脚复用为wake功能,检测到RXD的下降沿后MCU退出待机模式,然后MCU驱动STB引脚为低电平使CAN芯片退出待机模式。
总结
有任何问题欢迎沟通,觉得有用可以点个赞。

















 625
625

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









