






永磁同步电机滑模观测器无位置传感器矢量控制算法仿真模型,基于SMO的PMSM无位置传感器矢量控制算法。
其中SMO模块由锁相环组成,不同于反正切函数。
由matlab/simulink搭建,以供参考学习。
ID:72100679743330301
阳光彩虹小彪马
标题:无位置传感器永磁同步电机矢量控制算法仿真模型
摘要:本文基于SMO的PMSM无位置传感器矢量控制算法,通过Matlab Simulink搭建了一个永磁同步电机滑模观测器仿真模型。该模型将SMO模块与锁相环相结合,实现了对永磁同步电机的无位置传感器矢量控制。本文通过详细解析算法原理、控制流程和Simulink模型设计等方面,为读者提供了一种新的技术实现方式,并提供了仿真模型供参考和学习。
-
引言
永磁同步电机(PMSM)作为一种高效节能的电机类型,在工业自动化领域得到广泛应用。然而,传统的PMSM控制算法需要位置传感器来获取电机转子位置信息,增加了系统的复杂性和成本。为了解决这个问题,无位置传感器矢量控制算法应运而生。 -
SMO算法原理
2.1 滑模观测器原理
滑模观测器(Sliding Mode Observer, SMO)是一种基于滑模控制理论的观测器,通过观测系统的输出和状态变量之间的滑模面实现对系统状态的估计。本文介绍了SMO的基本原理和实现方式,并结合PMSM的无位置传感器矢量控制问题,提出了一种基于SMO的解决方案。
2.2 锁相环在SMO中的应用
传统的SMO中使用反正切函数来计算滑模面偏差,但其存在计算复杂度高和输出范围限制的问题。为了解决这个问题,本文引入了锁相环(Phase-Locked Loop, PLL)来替代传统的反正切函数。通过PLL的相位检测和锁定功能,实现了对滑模面偏差的高效计算和控制。
-
仿真模型设计
本文基于Matlab Simulink搭建了一个PMSM无位置传感器矢量控制算法的仿真模型。通过详细讲解模型设计步骤,包括电机模型建立、控制算法实现、参数配置等方面,读者可以清晰了解整个控制系统的工作流程和实现细节。 -
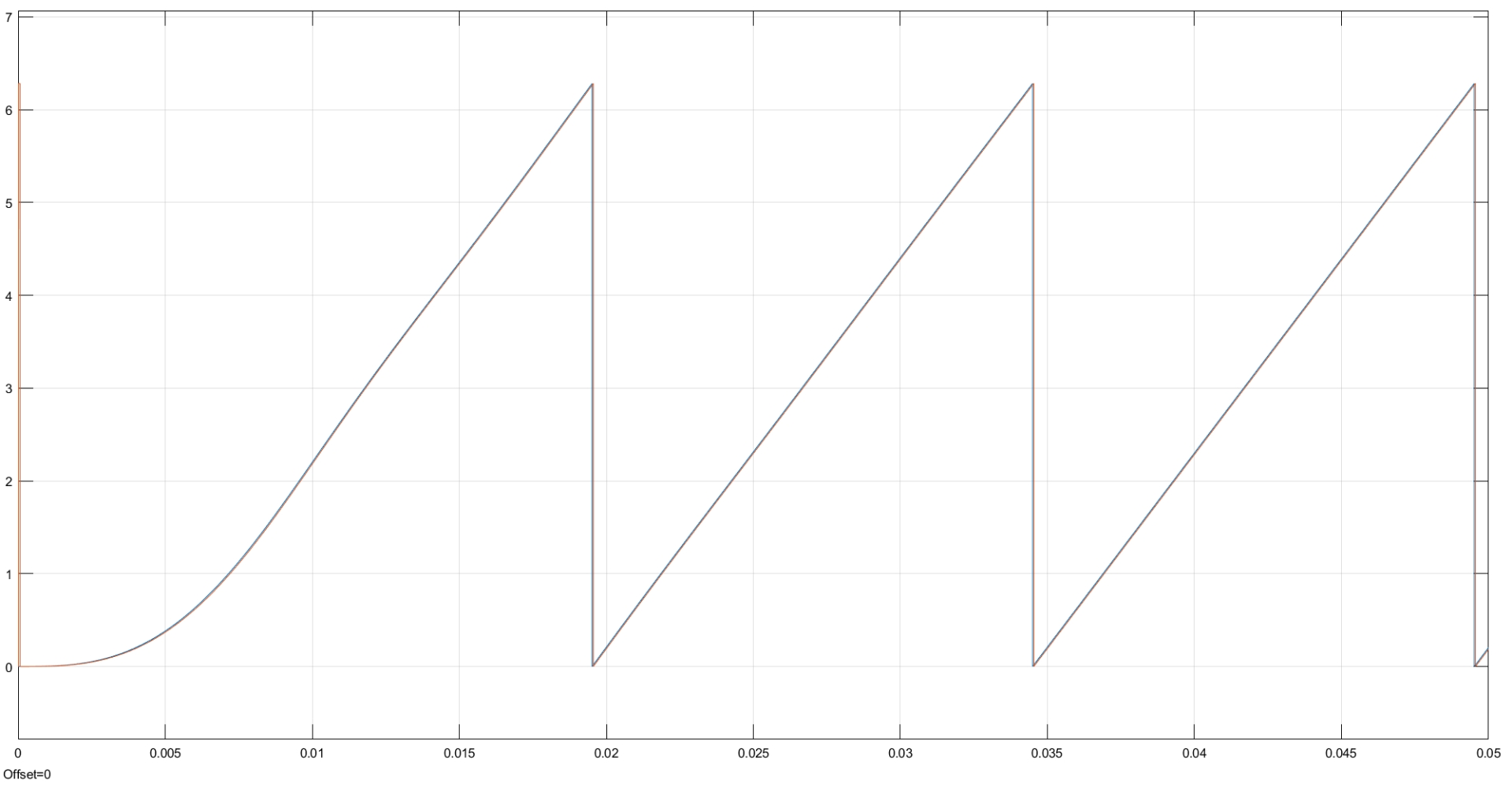
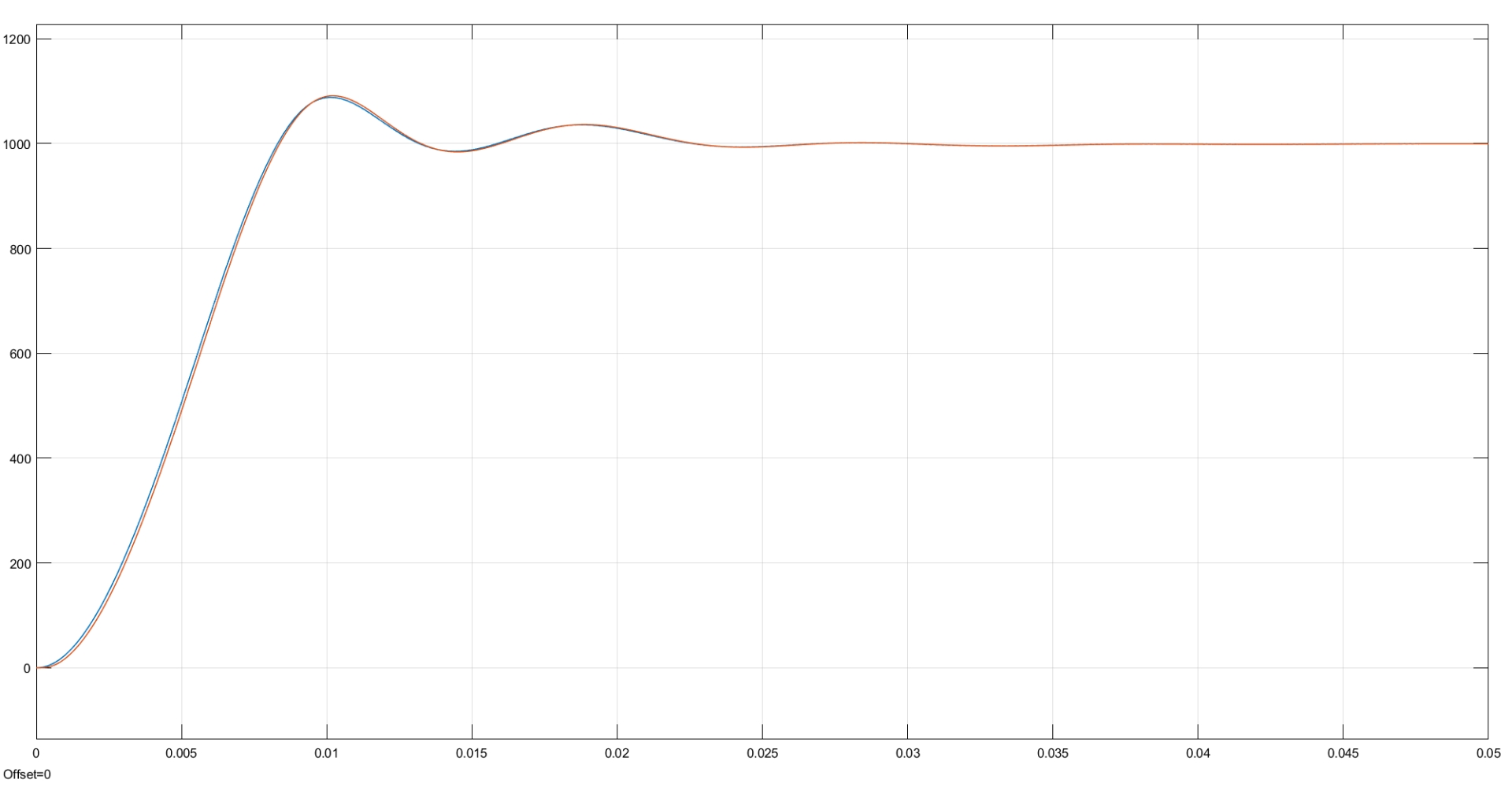
仿真结果与分析
通过对仿真模型的运行,本文得到了一系列实验结果,并进行了详细的分析和讨论。从转速响应、转矩输出等方面评估了无位置传感器矢量控制算法的性能,并与传统的位置传感器矢量控制算法进行比较。实验结果表明,本文提出的基于SMO的算法在提高控制精度和性能上具有一定优势。 -
总结与展望
本文通过介绍了无位置传感器永磁同步电机矢量控制算法的原理和设计过程,并通过Simulink搭建了相应的仿真模型。通过仿真结果的分析,验证了算法的有效性和性能优势。未来的研究方向可以进一步探索基于SMO的矢量控制算法在实际电机控制系统中的应用,以及优化算法的实时性和稳定性。
【关键词】永磁同步电机;无位置传感器;矢量控制;SMO算法;Simulink模型
【相关代码 程序地址】: http://nodep.cn/679743330301.html















 515
515











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









