






全阶滑模无位置传感器控制仿真模型,有基本的反正切的,有锁相环的,有基本的开关函数,有饱和函数,sigmod函数,以及幂函数多种滑模。
还有全阶滑模观测器仿真,相比传统滑模观测器消除了额外的低通滤波器,误差更小,效果堪称完美。
不仅误差小,脉动也少。
(单独)
还有基于扩张状态观测器的锁相环eso pll算法相比于传统pll误差更小(单独)
还有自适应滑模观测器,实现滑模增益的自适应,减小抖振,(单独)。
默认任选一个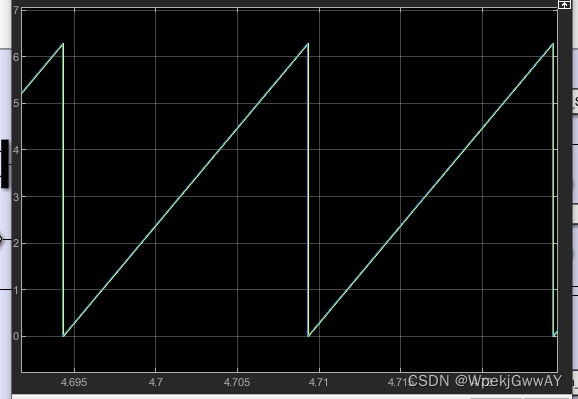
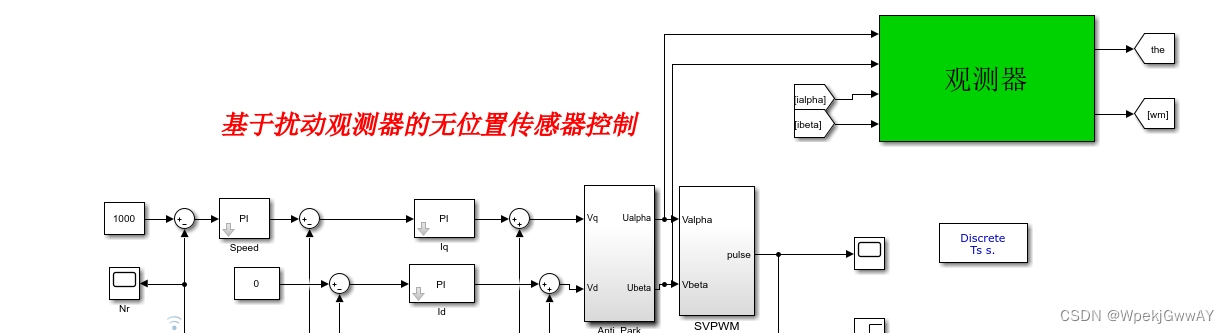
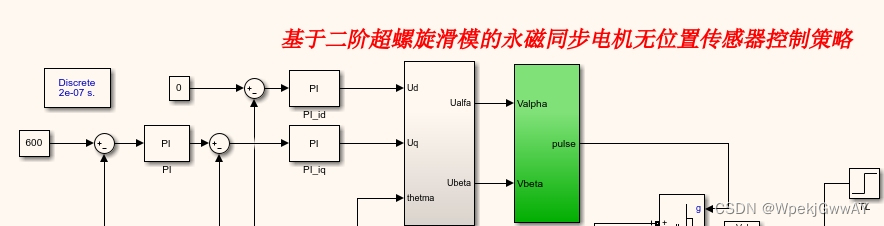

全阶滑模无位置传感器控制在电机控制领域中应用广泛,其采用先进的控制算法,以满足各种电机控制需求。本文将针对全阶滑模无位置传感器控制仿真模型进行分析,探讨该算法的工作原理及优越性。
- 全阶滑模无位置传感器控制仿真模型简介
全阶滑模控制算法是一种基于滑动模式理论的控制方法。相比传统的控制方法,全阶滑模控制算法可以不依赖于位置传感器实现控制,并且在去除不确定性和抗干扰性方面具有很强的优势。
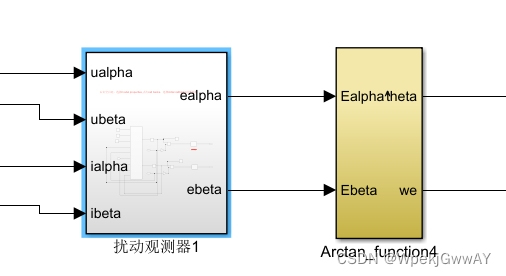
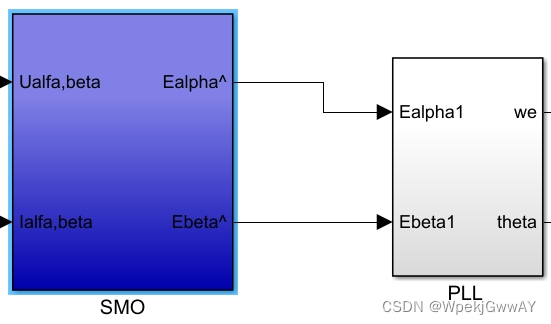
在全阶滑模无位置传感器控制仿真模型中,包含了多种常用的滑模函数,如反正切函数、锁相环函数、开关函数、饱和函数、sigmod函数和幂函数。这些函数可以适配不同的控制需求,从而实现更加灵活的控制。
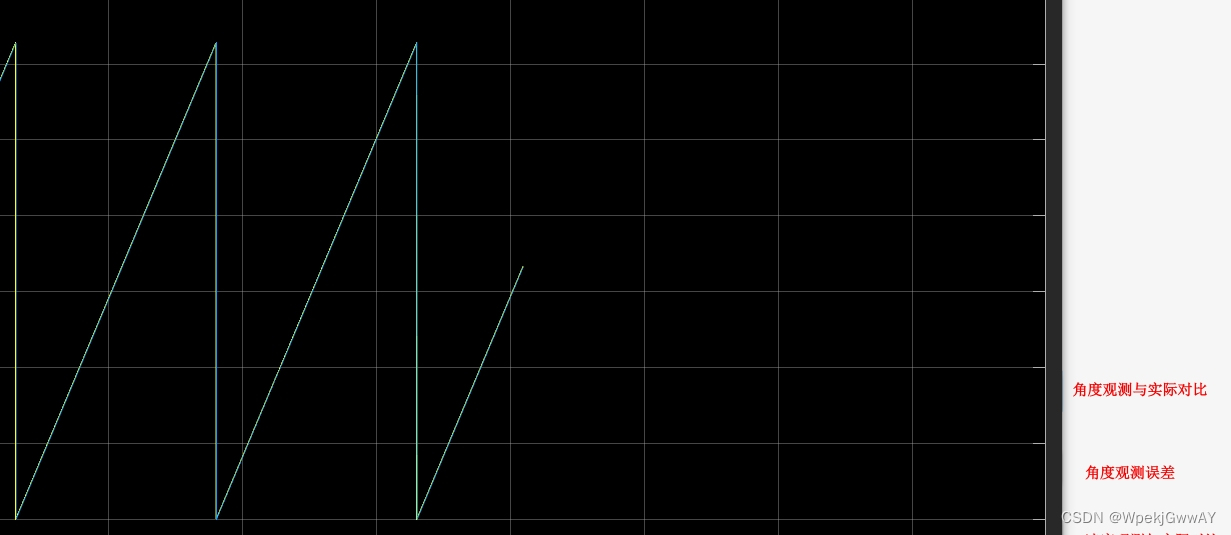
- 全阶滑模观测器仿真优越性分析
相比传统的滑模观测器,全阶滑模观测器消除了额外的低通滤波器,这样可以大大减少误差,提高控制精度。同时,脉动也得到了很好的控制。
全阶滑模观测器的工作原理是通过将被控对象的输出与模型输出进行比较,并将其差值送给全阶滑模控制器。因此,它可以更好地适应不同的控制环境,并提高控制精度。
- 基于扩张状态观测器的锁相环 ESO PLL 算法
基于扩张状态观测器的锁相环 ESO PLL 算法相比传统的 PLL 算法误差更小。其工作原理是通过扩张状态观测器来实现高精度观测,从而提高了控制效果。
相比传统的 PLL 算法,基于扩张状态观测器的锁相环 ESO PLL 算法可以更好地适应不同的控制环境,提高控制精度和稳定性。因此,在实际控制系统中,该算法受到了越来越广泛的应用。
- 自适应滑模观测器
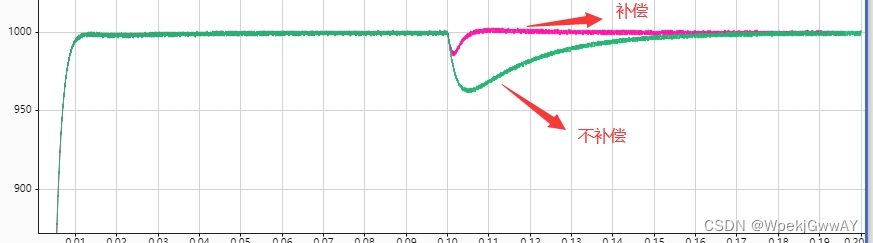
自适应滑模观测器是一种可以实现滑模增益自适应的控制算法。其工作原理是根据控制需求自动调整滑模增益,从而减小抖振,提高控制精度。
在实际应用中,自适应滑模观测器可以适应不同的控制环境,并减少不确定性和干扰,提高控制稳定性。因此,它在电机控制、移动机器人控制等众多领域中得到了广泛的应用。
总之,全阶滑模无位置传感器控制是一种先进的控制算法,具有很高的控制精度和稳定性,并且可以适应不同的控制环境。在实际应用中,它已经得到了广泛的应用,并且在未来的控制领域中仍然具有很大的潜力。
相关代码,程序地址:http://lanzouw.top/669729237949.html


















 1706
1706

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









