






永磁同步电机的无感控制(一)——— 传统的滑模观测器
前言
本博客传统滑模观测器的设计,是在矢量控制策略的基础上,通过运用滑模变结构理论对反电势进行估计,进而提取电机的转子信号和转速信息。 永磁同步电机的无感控制是通过检测电机绕组中的有关电信号,采用一定的控制算法进而实现转子位置及速度估算。这无疑会大大降低电机控制的成本,同时一般的机械传感器的安装使用会增加系统成本、尺寸和重量,并对使用环境有比较严格的要求。
如今较为成熟的无位置传感器算法主要可分为适用于中高速的基于模型的无位置传感器算法、适用于低速及零速的基于信号的无位置传感器算法以及开环启动算法。
1.基于模型的无位置传感器算法,主要是通过电机的数学模型进行转子位置和转速的估算,可分为开环估算和闭环估算,如下:
开环估算是检测电机端的电流、电压等物理信息,通过电机模型方程直接计算出转子的速度及位置信息,该方法的滞后较小但是对于干扰信号、电机运行中参数的变化和由于数字系统延时产生的电压不匹配问题敏感度较高,估算系统鲁棒性较差。
闭环估算的方法是通过构建一个观测器模型,通过设计合理的反馈调节使得观测器模型去逼近于实际电机物理模型,使两个模型近似拟合从而获取包含转子位置和速度信息的物理量用来进行转子位置和速度观测,该方法由于具有闭环反馈调节,因此相比于开环估算的方法鲁棒性较强。如今大部分的基于模型的无位置传感器算法都是通过观测电机的反电动势或者磁链信息来获取电机转子位置信息,这主要包括滑模观测器法、模型参考自适应法和扩展卡尔曼滤波法等。
2.电机低速运行时电机的反电动势较小,信噪比较低,这种情况下通过估算电机反电动势的方法估算精度较差。零速时,该方法完全失效。适用于低速和零速的基于信号的无位置传感器算法是通过外部对电机施加一个激励信号,之后通过提取检测电机端产生的相应的包含转子位置信息的物理量来进行转子位置和速度估算,该方法不依赖于反电动势大小和电机参数变化的影响。这主要包括低速高频信号注入法、由他启动等。
3.由于一些电机的运行工况基本都位于中高速段,根据控制算法简便性的要求,高频信号注入法并不适用,因此国内外学者设计了很多开环启动的算法,先将电机转速提升至估算算法可以准确估算的转速再进行闭环控制,开环启动算法主要分为V-F启动和I-F启动。
提示:以下是本博客正文内容,仅供参考与学习
1、传统滑模观测器的设计
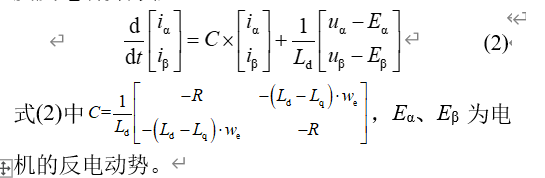
PMSM两相静止α-β坐标系下的电流状态方程及反电动势方程:
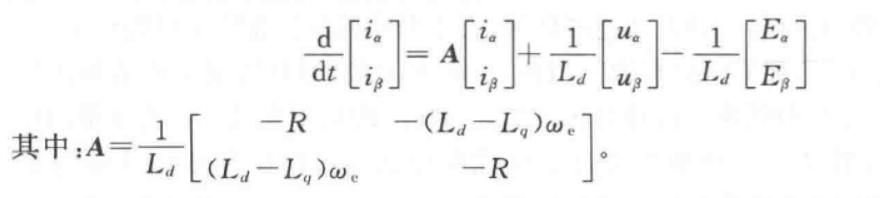
为了获取扩展的反电势,电流方程改写为:
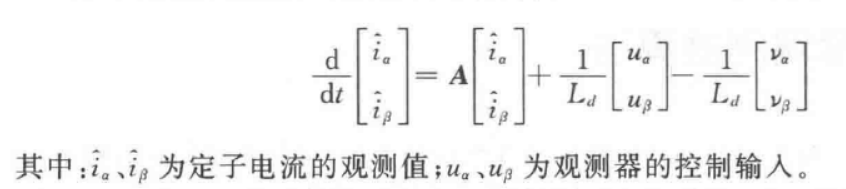
其中,传统的SMO设计如下:
将上述两式作差,可得:

因此,可设计滑模控制的滑模面为:

接着滑模控制律为:
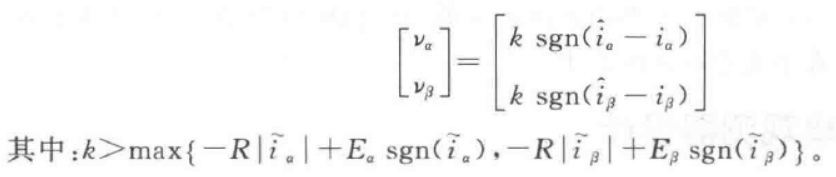
依据滑模控制的可达性条件,由此有:

最终,采取基于反正切的函数提取转子和转速信息,如下:


2、传统滑模观测器的仿真
2.1传统滑模观测器的仿真搭建

图2 基于传统滑模观测器的PMSM矢量控制仿真图
图2为传统滑模观测器的PMSM矢量控制仿真图,其中所采取的传统滑模观测器是基于反正切函数的,具体内部仿真结构如下:

图3 传统SMO的设计仿真图

图4 反正切函数提取转子信息仿真图
:
2.2传统滑模观测器的仿真结果
转速设定为1000r/min,转矩设定为带负载下1 N·m启动,扩展反电势估计、转子位置估计、转速、相电流和转矩响应波形依次如下所示:

图5 SMO的扩展反电势估计图

图6 SMO的转子位置估计图

图7 SMO的转速估计图

图8 PMSM电机转速响应曲线图

图9 d-q轴的电流响应曲线图

图10 相电流的响应曲线图

图11 转矩的响应曲线图
总结
1.传统的滑模观测器所产生的相电流谐波成分较大,并且转矩脉动较大;同时转速响应特性并不太好。为此可提出以下改进措施:用PLL锁相环替换基于反正切函数的转子信息提取,用更为先进的终端非奇异快速滑模趋近律,用更为合适的观测器来设计扩展反电势估计等。
2.转速估算滞后的影响分析,如何有效降低滤波器的使用也就成为一个研究的热点。
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











