






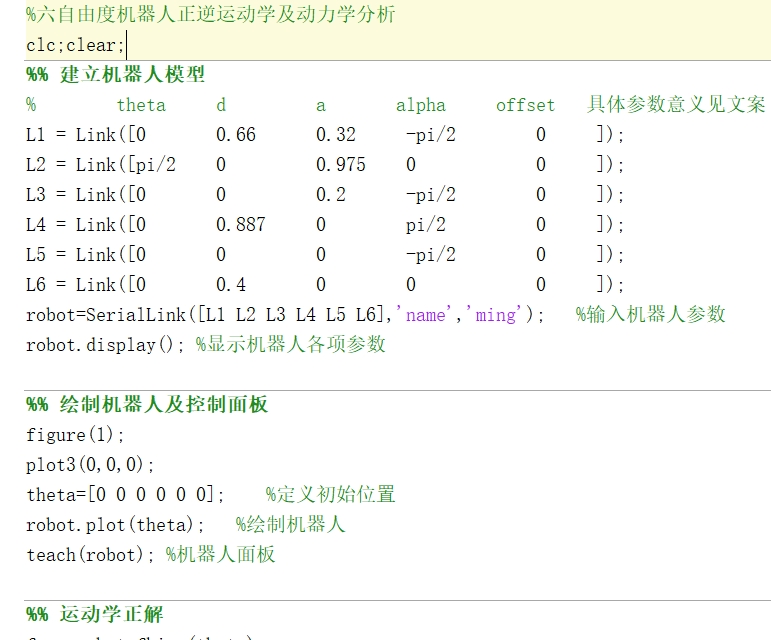
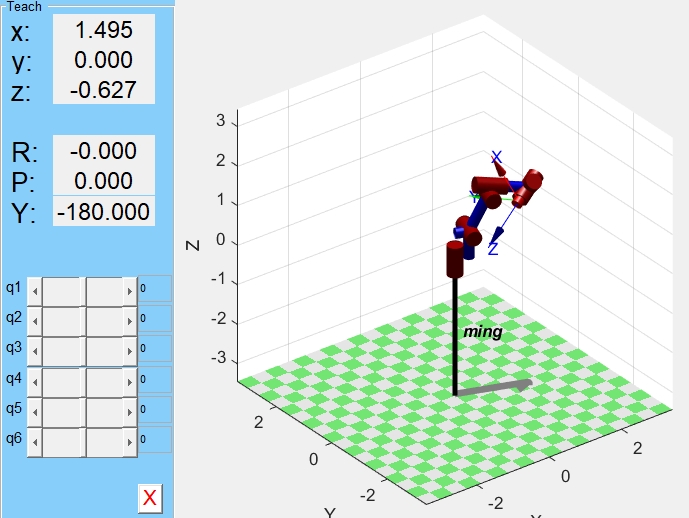
六自由度机械臂建模仿真(matlab程序),有控制面板,标价即为真实价格,代码可流畅运行
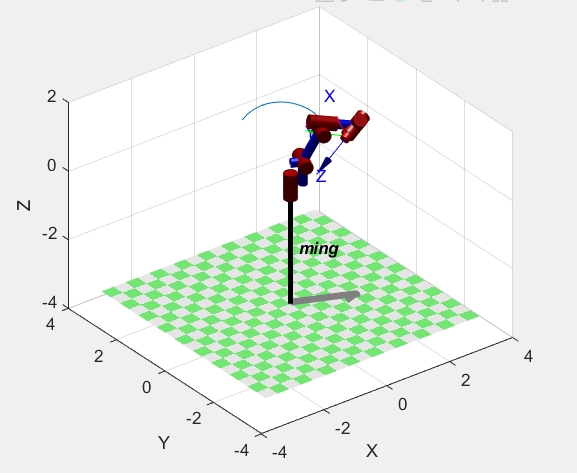
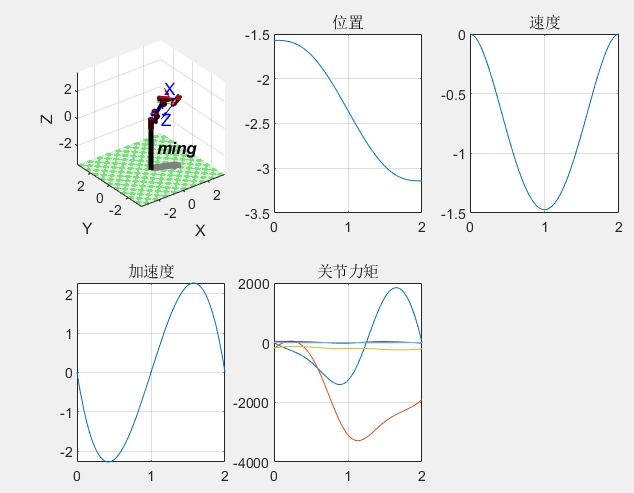
1、机器人运动学正逆解、动力学建模仿真与轨迹规划,雅克比矩阵求解
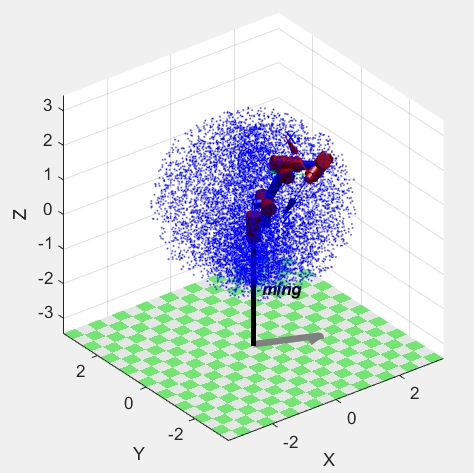
2、蒙特卡洛采样画出末端执行器工作空间
3、基于时间最优的改进粒子群优化算法机械臂轨迹规划设计
YID:9218678872030717
天河小鱼
六自由度机械臂是一种能够在六个方向上自由运动的机器人系统。在现今的工业自动化应用中,六自由度机械臂被广泛应用于物料搬运、装配和焊接等任务中。为了能够精确控制机械臂的运动,了解机械臂的运动学、动力学以及轨迹规划是非常重要的。
机器人运动学是研究机器人各个部分之间相对位置关系和运动规律的学科。对于六自由度机械臂,我们需要进行正逆解来确定关节角度和末端执行器的位姿。正解是根据给定的关节角度计算机械臂的位姿,而逆解则是根据给定的位姿计算关节角度。通过雅可比矩阵,我们可以求解出机械臂的速度和加速度,从而实现对机械臂的运动控制。
动力学建模仿真是研究机器人力学和运动学关系的一种方法。通过建立机械臂的动力学模型,我们可以预测机械臂在不同工作条件下的运动情况。利用动力学模型,我们可以计算机械臂的惯性力、重力和非线性力等。通过模拟机械臂在不同工作空间中的运动轨迹,我们可以评估机械臂的稳定性和精确性。
为了更好地了解机械臂的工作空间,我们可以使用蒙特卡洛采样方法来画出末端执行器的工作空间。蒙特卡洛采样是一种概率统计方法,通过随机采样来估计目标函数的数值。在机械臂的工作空间中,我们可以通过采样末端执行器的位置和姿态来估计机械臂的可达性和避障能力。
机械臂的轨迹规划是指根据给定的起始点和目标点,找到一条合适的路径使机械臂从起始点移动到目标点。在传统的机械臂轨迹规划中,通常使用启发式搜索算法,如A*算法或模拟退火算法。然而,这些方法往往需要大量的计算和搜索时间。为了改进机械臂轨迹规划的效率,我们可以利用时间最优的改进粒子群优化算法来进行机械臂轨迹规划设计。该算法通过不断迭代更新粒子的速度和位置,最终找到使机械臂在最短时间内到达目标点的最优路径。
通过以上几点的研究与设计,我们可以实现六自由度机械臂的精确运动控制和轨迹规划。通过机器人运动学正逆解和动力学建模仿真,我们可以了解机械臂的运动特性和工作条件。通过蒙特卡洛采样画出末端执行器的工作空间,我们可以评估机械臂的可达性和避障能力。通过改进粒子群优化算法进行机械臂轨迹规划设计,我们可以提高机械臂的运动效率和精确性。
本文主要通过MATLAB程序实现了六自由度机械臂的建模仿真,并使用控制面板进行运动控制。代码的编写与调试使得机械臂的运行变得流畅,能够准确地控制机械臂的运动。通过对机器人运动学正逆解、动力学建模仿真与轨迹规划的研究,我们可以更好地理解六自由度机械臂的运动特性和轨迹规划方法,进一步提高机械臂的运动控制精度和效率。
总之,六自由度机械臂的建模仿真和轨迹规划对于机器人领域的研究和应用具有重要意义。通过对机械臂运动学、动力学和轨迹规划的研究,我们可以实现机械臂的精确控制和高效运动。这对于提高生产效率、减少人工劳动和改善工作环境具有重要意义,并且将在未来的工业自动化领域得到广泛应用。
相关的代码,程序地址如下:http://nodep.cn/678872030717.html
















 336
336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









