







 本文详细介绍了步进电机电流闭环控制软件,包括电流环的kp和ki自动计算、16kHz PWM频率、modbus通信以及位置和速度模式。电流闭环控制通过PID算法提高精度,PWM频率影响电机控制效果,modbus通信确保系统稳定性,位置和速度模式适应不同应用场景。
本文详细介绍了步进电机电流闭环控制软件,包括电流环的kp和ki自动计算、16kHz PWM频率、modbus通信以及位置和速度模式。电流闭环控制通过PID算法提高精度,PWM频率影响电机控制效果,modbus通信确保系统稳定性,位置和速度模式适应不同应用场景。
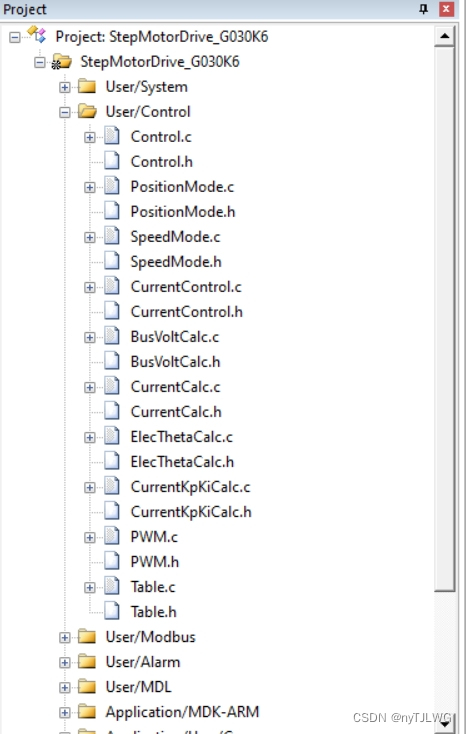
步进电机电流闭环控制软件:
电流闭环,电流环kp和ki自动计算;
PWM频率,电流环计算频率,16kHz;
modbus通信;
位置模式和速度模式。
步进电机电流闭环控制软件的技术分析
随着电路控制技术的不断发展,步进电机逐渐成为了现代工业生产线上的重要组成部分。而电流闭环控制技术则是步进电机控制领域中不可或缺的一部分。本文将围绕着步进电机电流闭环控制软件展开分析,重点探讨电流闭环、PWM频率、modbus通信、位置模式和速度模式等关键技术。
- 电流闭环控制
电流闭环控制是步进电机控制领域的核心技术之一。电流环kp和ki自动计算是电流闭环控制技术中的重要环节。在步进电机控制系统中,电流环kp和ki的自动计算基于PID控制算法,通过实时监测电机的电流变化,自动调整kp和ki的参数,以达到更加精准的控制效果。
- PWM频率
PWM频率也是步进电机电流闭环控制软件中的一项重要技术。PWM信号既可以控制步进电机的转速,也可以控制步进电机的电流大小。而PWM频率则是控制步进电机电流大小的关键因素之一。一般来说,PWM频率的选择都应该考虑控制效果、噪音和发热等因素,以达到较好的控制效果和使用寿命。
- modbus通信
modbus通信是步进电机控制领域中常用的通信协议之一。它能够实现控制器与外围设备之间的数据传输,使得步进电机控制系统的控制效果更加稳定、可靠。除此之外,modbus通信还可以支持多种通信方式,如串口通信、以
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2130
2130

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









