







 超级会员免费看
超级会员免费看
之前一直使用SemanticKITTI进行自动驾驶感知算法的评估,最近写paper的时候发现两年前新出了一个nuScenes-LidarSeg数据集,因此准备也将其加入评估体系。
nuScenes-LidarSeg数据集是nuScenes数据集的激光雷达语义分割子集,相比于SemanticKITTI,其最大的不同应该是采用了32线的激光雷达,因此数据密度少了一倍。通过对比算法在nuScenes-LidarSeg和SemanticKITTI上的表现,也可以评估算法在不同数据密度上的表现。
数据下载
使用nuScenes-LidarSeg数据集第一步是数据的下载,下载的地址如下(需要注册账号方能下载):https://www.nuscenes.org/nuscenes#lidarseg
定位到如下的地方点击下载即可:
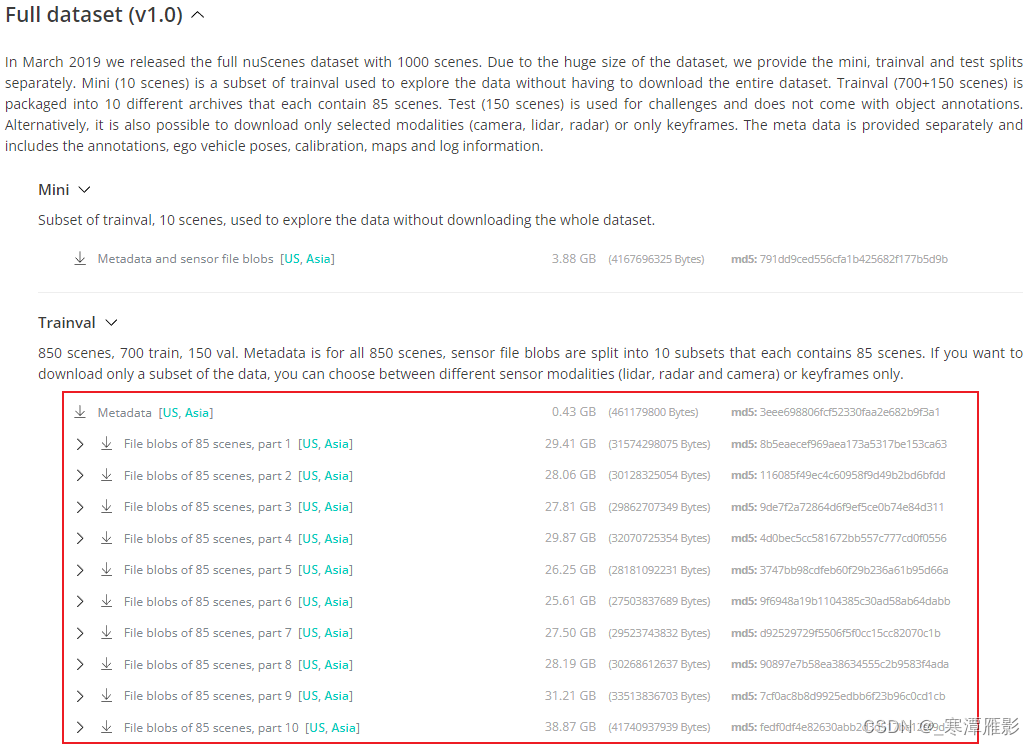
下载下来的数据集包含了全部传感器数据(似乎有单独下载的操作,本人没去研究。。。),总的数据大小有293G,如果网速慢的话,能把人下哭。
另外,最好把数据下载并且解压到SSD上,否则在机械硬盘上操作解压也需要好久好久好久。如果装的是Linux和Windows双系统的话,考虑到系统的IO速度,强烈建议在Linux上进行解压缩。
数据简介
将下载下来的数据全部解压可以得到v1.0-trainvalxx_blobs和v1.0-trainval_

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 576
576











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









