






AMP论文分析
AMP: Adversarial Motion Priors for Stylized Physics-Based Character Control
引入
先从从模仿学习IL(Imitation Learning)说起。正常的强化学习RL(Reinforcement Learning)过程是“环境互动+最大化认为人为设计的奖励函数=最优Actor”
逆强化学习IRL(Inverse Reinforcement Learning)则没有奖励,取而代之的是“环境互动+最大化从专家数据学到的奖励函数=最优Actor”
GAIL(Generative Adversarial Imitation Learning)是使用GAN(Generative Adversarial Network)的IRL,即训练一个生成器 G G G ,它从一个普通的分布逐渐生成与现有数据分布相似的分布。GAIL的数据集(参考运动)是 { ( s , a ) } \{(s,a)\} {(s,a)} 。同样,我们希望我们的 Actor 能够模仿专家,即 Actor 产生的轨迹(的分布)与专家产生的轨迹(的分布)相似。GAN中的生成器和判别器这里不再赘述。reward是鼓励policy的行为和数据集里面的 ( s , a ) (s,a) (s,a) 对尽可能像。
AMP目标
本文的目标是训练一个agent,让其完成某个目标(Goal),同时保持某种风格(Style),其中风格由expert dataset或者demonstration dataset提供。本文混合了目标实现和模仿学习,其中模仿学习使用对抗性方式学习对给定风格的遵守,AMP中的A(Adversarial)就是对抗性。
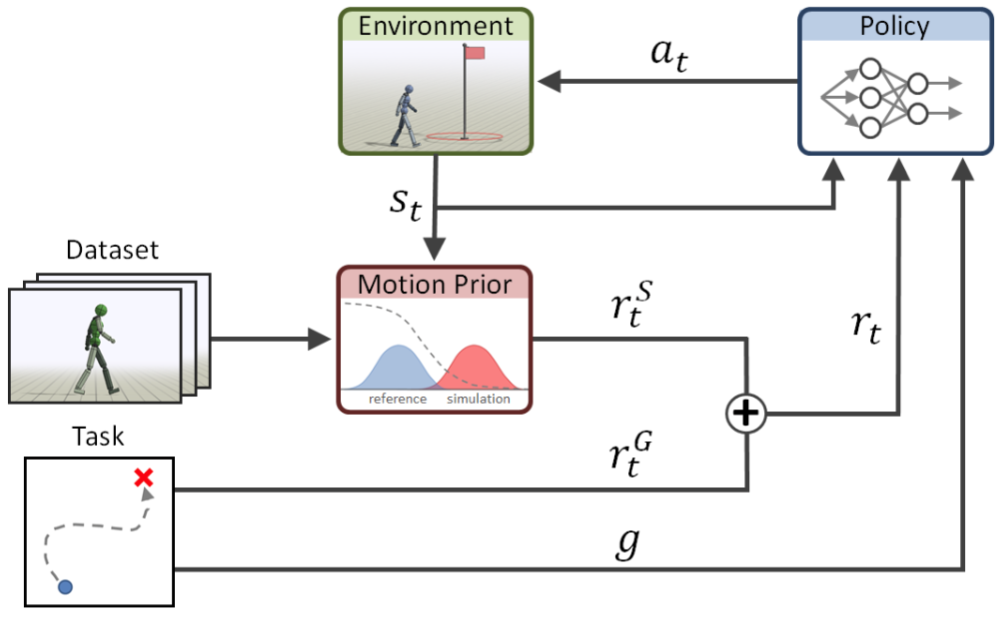
奖励函数由两部分组成,一部分是目标奖励
r
t
G
r_t^G
rtG ,另一部分是风格奖励
r
t
S
r_t^S
rtS ,通过计算两者的加权和得到总奖励:
r
(
s
t
,
a
t
,
s
t
+
1
,
g
)
=
w
G
r
G
(
s
t
,
a
t
,
s
t
+
1
,
g
)
+
w
S
r
S
(
s
t
,
s
t
+
1
)
r(s_t,a_t,s_{t+1},g)=w^Gr^G(s_t,a_t,s_{t+1},g)+w^Sr^S(s_t,s_{t+1})
r(st,at,st+1,g)=wGrG(st,at,st+1,g)+wSrS(st,st+1)
目标奖励
agent可以是人形机器人,也可以是四足机器人或者霸王龙。目标奖励函数 r t G r_t^G rtG 描述到达目标的程度,其根据目标来设计,如接近某个目标点或击打一个物体,这部分内容在附录中有详细介绍。作者针对不通的目标设计了很多奖励塑造,比如击打目标物体的任务,如果离目标很远则跑过去,如果离目标很近则切换到行走,如果与目标足够近则击打目标。agent观测环境得到state,生成action来实现目标。这里的任务设计是经典的策略梯度方法RL。
风格奖励
数据集可以是动捕数据,也可以从已经学会的Policy中得到。数据集只提供运动的风格,而不提供如何实现目标。风格奖励
r
t
S
r_t^S
rtS 描述遵守数据集中风格的程度,由运动先验(Motion Prior)进行判断,运动先验由GAN训练得到,经典的GAN Loss为:
arg
min
D
−
E
d
M
(
s
,
a
)
[
log
(
D
(
s
,
a
)
)
]
−
E
d
π
(
s
,
a
)
[
log
(
1
−
D
(
s
,
a
)
)
]
\arg\min_{D}\:-\mathbb{E}_{d^{M}(\mathrm{s,a})}\left[\log\left(D(\mathrm{s,a})\right)\right]-\mathbb{E}_{d^{\pi}(\mathrm{s,a})}\left[\log\left(1-D(\mathrm{s,a})\right)\right]
argDmin−EdM(s,a)[log(D(s,a))]−Edπ(s,a)[log(1−D(s,a))]
这里首先简单介绍一下标准的GAN(Generative Adversarial Network),就是要训练一个生成器和一个鉴别器。生成器接收随机噪声作为输入,从一个普通的分布逐渐生成与数据集分布相似的分布。鉴别器的任务是需要区分数据集中已有的
(
s
,
a
)
(s,a)
(s,a) 和生成器产生的
(
s
,
a
)
(s,a)
(s,a) ,最后的目标是欺骗鉴别器:生成器产生的数据来自数据集。
本文中使用的GAN与传统GAN有一些改动。首先对于Agent,基于当前状态 s s s ,采取动作 a a a ,得到下一个状态 s ′ s' s′ 。但是数据集中只有连续的状态 s i s_i si 而并没有对应的 a i a_i ai ,所以只使用上述三个参数中的 s s s 和 s ′ s' s′ 来描述一次Transition,故GAN的状态对变为 ( s , s ′ ) (s,s') (s,s′) 。除此之外与经典GAN不同的是,本文中的生成器其实就是Policy,输出也是 ( s , s ′ ) (s,s') (s,s′) ,所以鉴别器的任务就变成了区分数据集中已有的 ( s , s ′ ) (s,s') (s,s′) 和Policy产生的 ( s , s ′ ) (s,s') (s,s′) ,最后的目标同样是欺骗鉴别器:Policy产生的真实数据来自数据集。这里的鉴别器实际上就是运动先验。
本文使用的Loss也与经典GAN不同,使用了最小二乘鉴别器(Least-Squares Discriminator),使用平方损失,这样可以获得更好的梯度:
arg
min
D
E
d
M
(
s
,
s
′
)
[
(
D
(
s
,
s
′
)
−
1
)
2
]
+
E
d
π
(
s
,
s
′
)
[
(
D
(
s
,
s
′
)
+
1
)
2
]
\underset{D}{\operatorname*{\arg\min}}\:\mathbb{E}_{d^{M}(s,s^{\prime})}\left[\left(D(s,s^{\prime})-1\right)^{2}\right]+\mathbb{E}_{d^{\pi}(s,s^{\prime})}\left[\left(D(s,s^{\prime})+1\right)^{2}\right]
DargminEdM(s,s′)[(D(s,s′)−1)2]+Edπ(s,s′)[(D(s,s′)+1)2]
上述公式的意思就是:如果数据来自真实数据
M
M
M ,
D
(
s
,
s
′
)
D(s,s^{\prime})
D(s,s′) 会接近1;如果数据来自Policy
Π
\Pi
Π ,
D
(
s
,
s
′
)
D(s,s^{\prime})
D(s,s′) 会接近-1。
使用鉴别器的输出来设计风格奖励函数:
r
(
s
t
,
s
t
+
1
)
=
max
[
0
,
1
−
0.25
(
D
(
s
t
,
s
t
+
1
)
−
1
)
2
]
r(s_t,s_{t+1})=\max\left[0,1-0.25{\left(D(s_t,s_{t+1})-1\right)}^2\right]
r(st,st+1)=max[0,1−0.25(D(st,st+1)−1)2]
可以看出,风格奖励被限制在0到1之间。如果鉴别器的输出
D
(
s
t
,
s
t
+
1
)
=
1
D(s_t,s_{t+1})=1
D(st,st+1)=1 ,此时奖励达到最大(1),即鉴别器认为
(
s
,
s
′
)
(s,s')
(s,s′) 来自数据集。换句话说就是,当Policy设法产生了鉴别器认为是来自数据集的Transaction
(
s
,
s
′
)
(s,s')
(s,s′) ,他就会获得最大奖励。
总体流程
总结一下,上述训练过程就是policy在试图达到目标的同时去欺骗鉴别器“我就是数据集”;鉴别器则在试图区分开Policy产生的数据和数据集中的数据。
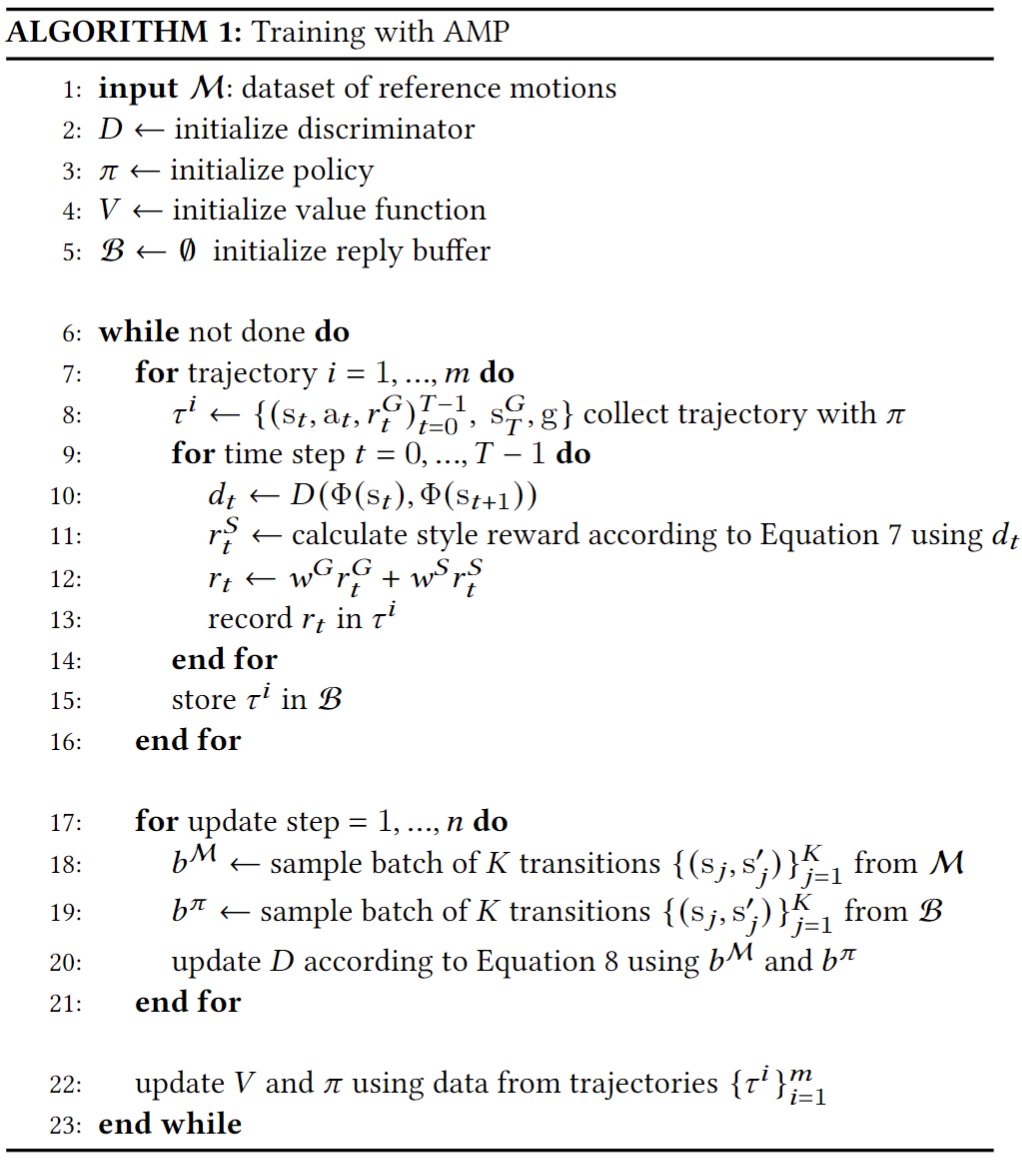
上述过程可以用伪代码来表示。1-5行是初始化各种buffer;7-8行使用policy产生m步的轨迹;第10行把transitions给判别器,状态对使用特征函数来 Φ \Phi Φ 表示;11行根据上面的公式,使用鉴别器的输出计算风格奖励;12行通过计算目标奖励和加权奖励的加权和得到总奖励;15行将得到的轨迹存到reply buffer;20行使用reply buffer来更新鉴别器;22行更新价值函数和策略。
梯度惩罚
GAN训练可能不稳定,使用梯度惩罚可以稳定训练
arg
min
D
E
d
M
(
s
,
s
′
)
[
(
D
(
Φ
(
s
)
,
Φ
(
s
′
)
)
−
1
)
2
]
+
E
d
π
(
s
,
s
′
)
[
(
D
(
Φ
(
s
)
,
Φ
(
s
′
)
)
+
1
)
2
]
+
w
g
p
2
E
d
M
(
s
,
s
′
)
[
∥
∇
ϕ
D
(
ϕ
)
∣
ϕ
=
(
Φ
(
s
)
,
Φ
(
s
′
)
)
∥
2
]
\begin{aligned} \underset{D}{\operatorname*{\arg\min}}& \mathbb{E}_{d^{\mathcal{M}}(\mathrm{s,s'})}\left[\left(D(\Phi(\mathrm{s}),\Phi(\mathrm{s'}))-1\right)^2\right] \\ &+\mathbb{E}_{d^{\pi}(\mathrm{s,s^{\prime}})}\left[\left(D\left(\Phi(\mathrm{s}),\Phi(\mathrm{s^{\prime}})\right)+1\right)^{2}\right] \\ &+\frac{w^\mathrm{gp}}2\:\mathbb{E}_{d^M(\mathrm{s},\mathrm{s}^{\prime})}\left[\left\|\nabla_{\phi}D(\phi)|_{\phi=(\Phi(\mathrm{s}),\Phi(\mathrm{s}^{\prime}))}\right\|^2\right] \end{aligned}
DargminEdM(s,s′)[(D(Φ(s),Φ(s′))−1)2]+Edπ(s,s′)[(D(Φ(s),Φ(s′))+1)2]+2wgpEdM(s,s′)[
∇ϕD(ϕ)∣ϕ=(Φ(s),Φ(s′))
2]
上面第三行惩罚了判别器出来的梯度范数
动作组合与过渡
AMP的另一个强大之处是经过学习之后可以组合数据集中的动作,也可以在多个动作之间自动过渡。比如数据集中只有独立的行走或奔跑而没有从行走到奔跑、从奔跑到行走这种组合,中间的转换过程则由策略自己学习。
这种多个动作的组合需要用权重来控制,比如举起手行走,如果举手的权重过小,则几乎无法行走;如行走的权重过小,则无法举手。
参考文献:
https://www.youtube.com/watch?v=P38FZrbNHV4
https://blog.csdn.net/weixin_41960890/article/details/123644185
https://zhuanlan.zhihu.com/p/503357084#ref_1
https://xbpeng.github.io/projects/AMP_Locomotion/index.html
https://xbpeng.github.io/projects/DeepMimic/index.html
https://xbpeng.github.io/projects/AMP/index.html
https://arxiv.org/abs/2203.14912
https://rofunc.readthedocs.io/en/latest/lfd/RofuncRL/AMP.html


















 8779
8779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











