







参考文章:https://www.alanzucconi.com/2020/09/14/inverse-kinematics-in-3d/
上一篇:grbl控制3轴机械臂 原理 实现 (一) 之2D机械臂模拟及实现
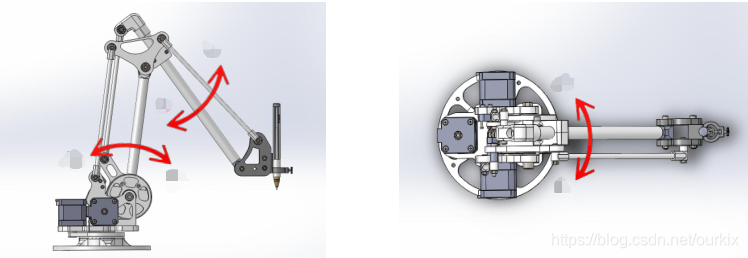
3轴机械臂几何分析
到目前为止,我们知道了如何在XY平面约束的情况下解决正逆运动学问题。从2D到3D的诀窍是重新使用2D解决方案。我们所介绍的这种3轴机械臂,一共3个轴,控制L1臂一个轴,控制L2臂一个轴,底座将L1和L2臂整体旋转为一个轴。很明显我们就多了一个整体旋转的维度。并且底座的旋转不会改变L1和L2臂的角度。
我们可以通过三个步骤解决问题:
- 绕Y轴旋转目标点,直到它位于XY平面上
- 移动机械臂L1和L2臂,使其到达目标该点,就像在2D模式下一样
- 通过沿Y轴的相反方向旋转整个机械臂来“撤消”旋转。
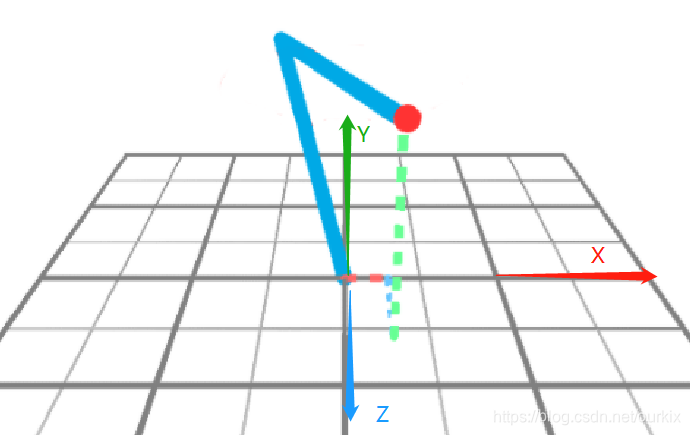
以上三个步骤逆解举例:
假设我们最终要得到的目标点是下图红色点 ,那么我们就要求得大臂旋转角度,小臂旋转角度,两臂在Y轴旋转角度
,那么我们就要求得大臂旋转角度,小臂旋转角度,两臂在Y轴旋转角度
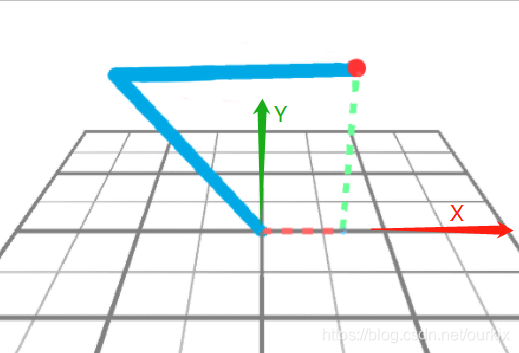
根据步骤一,绕Y轴旋转到X,Y平面上如下图,这样我们就能像处理2D机械臂一样
步骤二,在此平面上处理得到的L1,L2臂角度
步骤三,得到L1,L2臂的角度后,恢复Y轴的旋转,并求得Y轴的旋转角度
根据的值,求得紫色的线与X轴的夹角,这个夹角就是Y轴的旋转角度
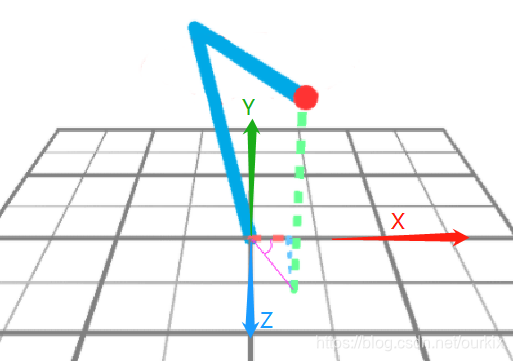
至此,3个角度都求出来了。
实际上,旋转Y轴是为了方便理解,实际应用中,我们可以认为目标点所处于平面(W,Y)上
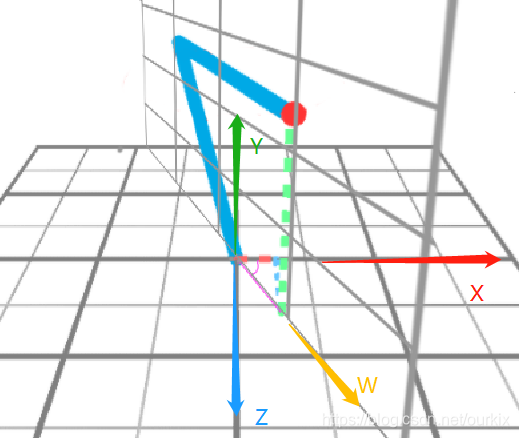
在这个(W,Y)平面上,直接按2D机械臂方式来算出L1,L2臂的角度即可,Y轴旋转角度计算照旧。
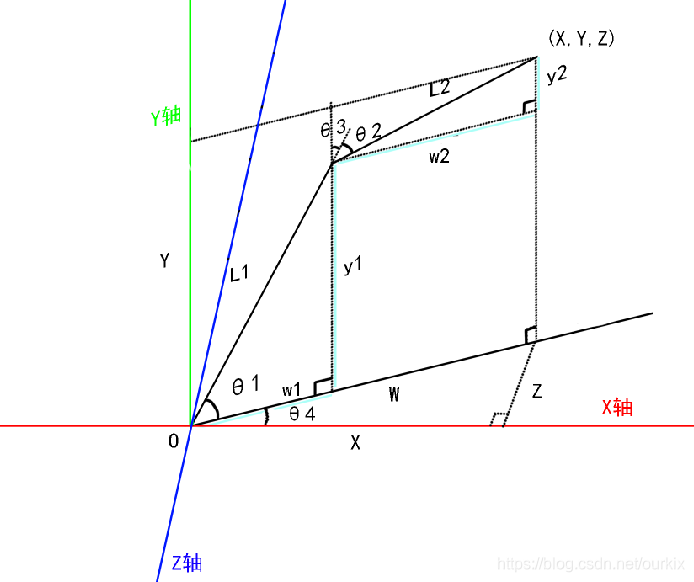
3D运动学逆解(Inverse kinematics)
我们把2d机械臂的图画到3d里面,可见原来我们的X边,变成了W边


根据坐标轴得知W边在(X,Z)平面,根据X边,W边,Z边是直角三角形,通过公式  求出W的长度
求出W的长度
代入值得
 得
得 
再根据W边和Y边求出原点到(X,Y,Z)的距离为A边,W边,Y边,A边是直角三角形,依旧通过公式
代入值得
 得
得  代入上面W得
代入上面W得 
接下来就和2d机械臂一样了
 代入以上公式得
代入以上公式得 
得

余弦定理公式:

根据余弦定理,将值代入公式得





同上根据余弦定理:




有:

 是X轴到W边的角度,我们用三角函数来求
是X轴到W边的角度,我们用三角函数来求
Z边,X边,W边组成一个直角三角形,则
 得
得 
这就求出3D机械臂的三个旋转角度了。
3D运动学正解(Forward kinematics)
对于3D机械臂的运动学正解,依旧可以和2D机械臂的方法。
首先我们已知L1,L2臂的臂长,L1,L2臂的角度和机械臂在Y轴旋转的角度,求坐标
首先和2D机械臂一样,我们先求X,Y的坐标,在这里就是W,Y平面,就是求W和Y的值。
w1,w2,y1,y2分别是浅蓝色线段部分
由于w1和w2是平行的,所以L1和w1所成角度,和L1和w2所成角度相同,所以有

根据三角函数:




则
 代入上式得
代入上式得 
 代入上式得
代入上式得 
然后根据W的值,求X和Z的值
 得
得 
 得
得 
至此求得X,Y,Z的值
软件模拟实现
这里用的unity进行的模拟,通过unity里面的父子组件关系,L1旋转可以带动其子组件L2一起旋转。所以一个臂是由两部分组成的joint和arm如图
这样把两个臂组装起来,再把他们绑在一个原点方块this上
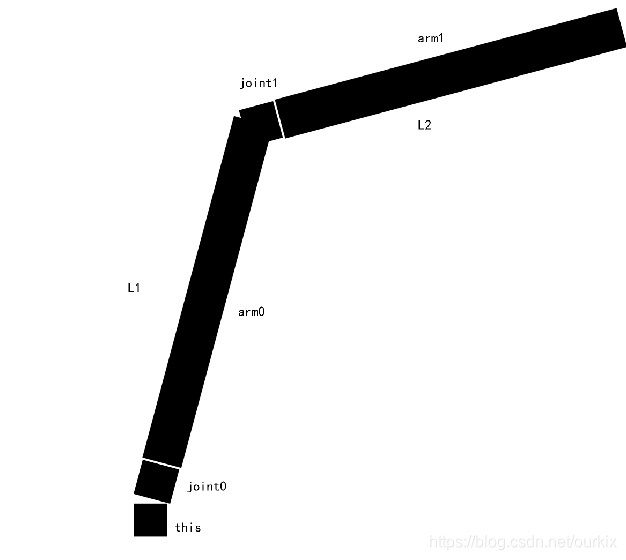
它们的父子关系是
- this
- joint0
- arm0
- joint1
- arm1
- joint0
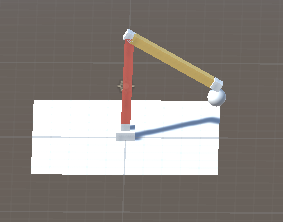
组合好后的样子
此脚本放在this方块上,并把joint0,joint1,的transform拖到脚本的公共变量上
代码实现:
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
public class ik : MonoBehaviour {
//[Header("Joints")]
public Transform Joint0;
public Transform Joint1;
public Transform Hand;
//[Header("Target")]
public Transform Target;
private float length0, L1;
private float length1, L2;
private float L1_2, L2_2;
private int X_AXIS = 0;
private int Y_AXIS = 1;
private int Z_AXIS = 2;
private float SCARA_OFFSET_X = 0;
private float SCARA_OFFSET_Y = 0.72f;
private float SCARA_OFFSET_Z = 0;
public bool angle_mode = false;
private float[] cartesian = new float[3], f_scara = new float[3];
void Start()
{
length0 = Vector3.Distance(Joint0.position, Joint1.position);
length1 = Vector3.Distance(Joint1.position, Hand.position);
L1 = length0;
L2 = length1;
L1_2 = sq(L1);
L2_2 = sq(L2);
}
// Update is called once per frame
void Update() {
float length2 = Vector3.Distance(Joint0.position, Target.position);
if (length2 > length0 + length1 - 0.3f)
{
}
else
{
cartesian[0] = Target.position.x;
cartesian[1] = Target.position.y;
cartesian[2] = Target.position.z;
inverse_kinematics(cartesian, f_scara);
float[] cart = new float[3];
float[] scar = new float[3];
scar = (float [])f_scara.Clone();
forward_kinematics_SCARA(scar, cart);
Debug.Log("x:" + cart[0]);
Debug.Log("y:" + cart[1]);
Debug.Log("z:" + cart[2]);
}
Joint0.transform.localEulerAngles = new Vector3(0, 0, 0);
Vector3 Euler0 = Joint0.transform.localEulerAngles;
Euler0.x = 90f - f_scara[0];
Joint0.transform.localEulerAngles = Euler0;
Joint1.transform.localEulerAngles = new Vector3(0, 0, 0);
Vector3 Euler1 = Joint1.transform.localEulerAngles;
Euler1.x = f_scara[1];
Joint1.transform.localEulerAngles = Euler1;
this.transform.localEulerAngles = new Vector3(0, 0, 0);
Vector3 Euler2 = this.transform.localEulerAngles;
Euler2.y = f_scara[2];
this.transform.localEulerAngles = Euler2;
}
float sq(float a)
{
return a * a;
}
// f_scara是大臂和小臂的角度,cartesian是坐标
void inverse_kinematics(float[] cartesian, float[] f_scara)
{
/***********************robot arm****************************/
// y + /z
// | /
// |/
// +-----+x
float ROBOTARM_alpha, ROBOTARM_beta, ROBOTARM_cta, ROBOTARM_alphapsi, projectxyLength, X, Y, X_2, Y_2, sqrtx_2ay_2;
//首先求得目标点 到 原点的距离
//获取机械臂投射到xy平面的长度
//length = sqrt(x*x + y*y)
projectxyLength = Mathf.Sqrt(sq(cartesian[X_AXIS]) + sq(cartesian[Z_AXIS]));//对调yz,坐标系不同
//将3d机械臂变量变为2d机械臂的变量
// projectxyLength长度为2d机械臂的X
X = projectxyLength;
X_2 = sq(X);
Y = cartesian[Y_AXIS];//对调yz,坐标系不同
Y_2 = sq(Y);
sqrtx_2ay_2 = Mathf.Sqrt(X_2 + Y_2);
//求得机械臂所在yz旋转平面的alphapsi角度
ROBOTARM_alphapsi = Mathf.Acos(X / sqrtx_2ay_2);
//如果坐标在平面以下,将alphapsi取反
if (Y < 0)
{
ROBOTARM_alphapsi = -ROBOTARM_alphapsi;
}
//求得机械臂所在yz旋转平面的alpha角度,,即大臂到xy平面的角度(实际是弧度)
ROBOTARM_alpha = Mathf.Acos((L1_2 + X_2 + Y_2 - L2_2) / (2 * L1 * sqrtx_2ay_2)) + ROBOTARM_alphapsi;
//求得小臂的角度(实际是弧度)
ROBOTARM_beta = Mathf.Acos((X_2 + Y_2 - L1_2 - L2_2) / (2 * L1 * L2));
//求得整体机械臂的旋转角度(实际是弧度)
ROBOTARM_cta = Mathf.Atan2(cartesian[X_AXIS], cartesian[Z_AXIS]);
//如果不是角度模式
if (!angle_mode)
{
f_scara[X_AXIS] = Mathf.Rad2Deg * ROBOTARM_alpha; //大臂旋转弧度转换为角度
f_scara[Y_AXIS] = Mathf.Rad2Deg * ROBOTARM_beta; //小臂旋转弧度转换为角度
f_scara[Z_AXIS] = Mathf.Rad2Deg * ROBOTARM_cta;
}
//否则是角度模式
else
{
f_scara[X_AXIS] = cartesian[X_AXIS];
f_scara[Y_AXIS] = cartesian[Y_AXIS];
f_scara[Z_AXIS] = cartesian[Z_AXIS];
}
}
//传入值 f_scara是大臂和小臂的角度,cartesian是最终求得的坐标
void forward_kinematics_SCARA(float [] f_scara, float [] cartesian)
{
/***********************robot arm****************************/
float X, Y, Z;
float project3D;
//f_scara里面的0,1,2代表:大臂角度,小臂角度,旋转角度
// y + /z
// | /
// |/
// +-----+x
//unity 角度空间转换转换
//f_scara[X_AXIS] = 90f - f_scara[X_AXIS];
//2D机械臂朝向的方向,两臂投影到平台平面长度
//Z = Mathf.Cos(Mathf.Deg2Rad * f_scara[X_AXIS]) * L1 + Mathf.Sin((Mathf.Deg2Rad * f_scara[Y_AXIS]) + (Mathf.Deg2Rad * 90) - (Mathf.Deg2Rad * f_scara[X_AXIS])) * L2;
//3D 两臂投影到平台平面长度,通过三角函数转化为坐标轴方向长度
project3D = Mathf.Cos(Mathf.Deg2Rad * f_scara[X_AXIS]) * L1 + Mathf.Sin((Mathf.Deg2Rad * f_scara[Y_AXIS]) + (Mathf.Deg2Rad * 90) - (Mathf.Deg2Rad * f_scara[X_AXIS])) * L2;
Z = Mathf.Cos((Mathf.Deg2Rad * f_scara[Z_AXIS])) * project3D;
//垂直向上的方向
Y = Mathf.Sin((Mathf.Deg2Rad * f_scara[X_AXIS])) * L1 + Mathf.Cos((Mathf.Deg2Rad * f_scara[Y_AXIS]) + (Mathf.Deg2Rad * 90) - (Mathf.Deg2Rad * f_scara[X_AXIS])) * L2;
//2D 站机械臂后方看向它,它的右边方向
//X = Mathf.Sin((Mathf.Deg2Rad * f_scara[Z_AXIS])) * Mathf.Cos((Mathf.Deg2Rad * f_scara[X_AXIS])) * L1 + Mathf.Sin((Mathf.Deg2Rad * f_scara[Y_AXIS]) + (Mathf.Deg2Rad * 90) - (Mathf.Deg2Rad * f_scara[X_AXIS])) * L2;
//3D 站机械臂后方看向它,它的右边方向
X = Mathf.Sin((Mathf.Deg2Rad * f_scara[Z_AXIS])) * project3D;
cartesian[X_AXIS] = X + SCARA_OFFSET_X; //求得机械手顶点的坐标
cartesian[Y_AXIS] = Y + SCARA_OFFSET_Y; //求得机械手顶点的坐标
cartesian[Z_AXIS] = Z + SCARA_OFFSET_Z;
/***********************robot arm****************************/
}
}实现效果演示
接下来介绍下GRBL,以及如何在GRBL上控制机械臂,以及机械臂控制的硬件细节
下一篇:grbl控制3轴机械臂 原理 实现 (三) 之如何通过步进电机控制机械臂、插补算法

















 2563
2563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









