






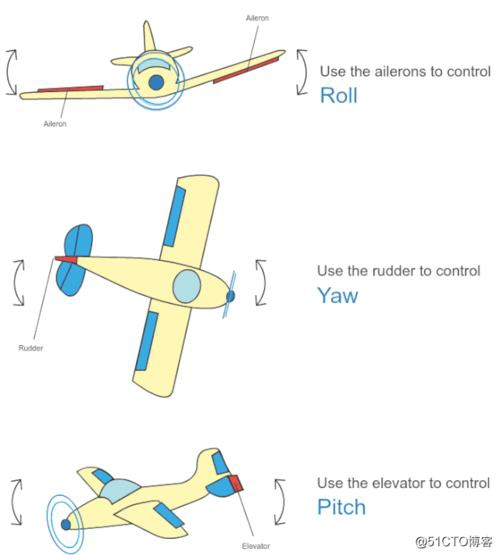
MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
短时间内我们相信陀螺仪,长时间内我们可以相信加速度计。
使用扩展卡尔曼滤波(EKF)将数据融合。
选取状态量为四元数和三轴陀螺仪的漂移 控制量为陀螺仪采样值 观测量为 三轴加速度计和磁偏角
YID:14200673825536274
卡尔曼智慧科技

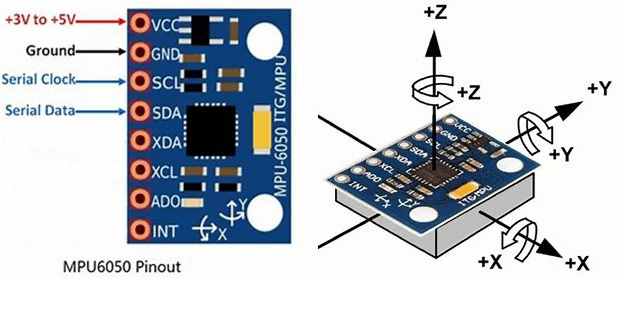
MPU9250是一种九轴传感器,具有陀螺仪、加速度计和磁力计等功能。在姿态估计和导航等领域中,数据融合算法的选择至关重要。本文将介绍如何使用扩展卡尔曼滤波(EKF)来实现MPU9250的数据融合,并重点讨论状态量、控制量和观测量的选择。
在数据融合中,陀螺仪和加速度计是最常用的传感器。陀螺仪测量角速度,可以用于短时间内姿态估计,但由于积分误差的累积,长时间内的可靠性较差。而加速度计可以测量重力加速度,用于长时间内的姿态估计。因此,我们可以利用陀螺仪的快速响应特性进行短时间内的姿态估计,然后借助加速度计来校正陀螺仪的积分误差,从而获得更准确的姿态估计结果。
扩展卡尔曼滤波是一种常用的非线性滤波算法,适用于具有非线性状态转移和观测模型的系统。在MPU9250的数据融合中,我们选择四元数作为状态量,它能够表示物体在三维空间中的姿态。同时,我们将陀螺仪的漂移作为需要控制的状态量,以降低积分误差对姿态估计的影响。观测量方面,除了加速度计测量的三轴加速度,还考虑了磁力计测量的磁偏角。通过结合陀螺仪、加速度计和磁力计的测量结果,我们可以更准确地估计MPU9250的姿态。
在实际应用中,实现MPU9250数据融合算法需要以下几个步骤。首先,进行传感器校准,包括陀螺仪的零偏校准、加速度计的零偏和比例校准、磁力计的零偏和刻度校准。然后,通过陀螺仪获得初始姿态估计,并根据加速度计的测量结果进行积分误差校正。接下来,利用扩展卡尔曼滤波算法进行数据融合,更新状态量和协方差矩阵。最后,根据融合后的姿态估计结果进行应用,如导航或者控制。
MPU9250的数据融合算法可以广泛应用于飞行器、机器人和虚拟现实等领域。通过合理选择状态量、控制量和观测量,并利用扩展卡尔曼滤波算法,可以提高姿态估计的准确性和稳定性。此外,还可以根据实际需求进行算法优化和改进,以适应不同应用场景的需求。
总之,MPU9250九轴传感器的数据融合算法可以帮助我们获得更准确的姿态估计结果。通过选择合适的状态量、控制量和观测量,并应用扩展卡尔曼滤波算法,我们可以充分利用陀螺仪和加速度计的优势,提高姿态估计的可靠性和精度。这一算法对于飞行器、机器人和虚拟现实等领域的应用具有重要意义,并具有广阔的发展前景。
希望本文的介绍对读者能够提供有关MPU9250九轴传感器数据融合算法的深入理解,并在实际应用中发挥积极作用。同时,也欢迎读者深入研究和探索,为MPU9250的数据融合算法提供更多的改进和优化思路,共同推动技术的不断进步和创新发展。
相关的代码,程序地址如下:http://wekup.cn/673825536274.html
















 530
530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









