









1. AHRS简介
九轴MEMS传感器(三轴陀螺仪+三轴加速度计+三轴磁强计)可以用来做航向和姿态参考系统,即AHRS(attitude &heading reference system),其中涉及的算法就暂且称之为AHRS算法吧。AHRS可以用在无人机、手机、机器人等情境下的姿态计算。当然,将磁强计去掉,可以退化为垂直参考系统VRU。
2. 项目简介
在此记录一个良心开源项目,为On Attitude Estimation with Smartphones
是Thibaud Michel先生所贡献,这个项目集合了几乎市面上所有的AHRS算法,并将其一一实现,然后利用iphone等手机进行算法测试(涉及不同手持姿势、也有关于磁干扰的处理),并用光学动捕作为姿态真值进行评价。更为难能可贵的是,除文章外,代码、实验数据和数据采集工具全部公开,必须强烈推荐。
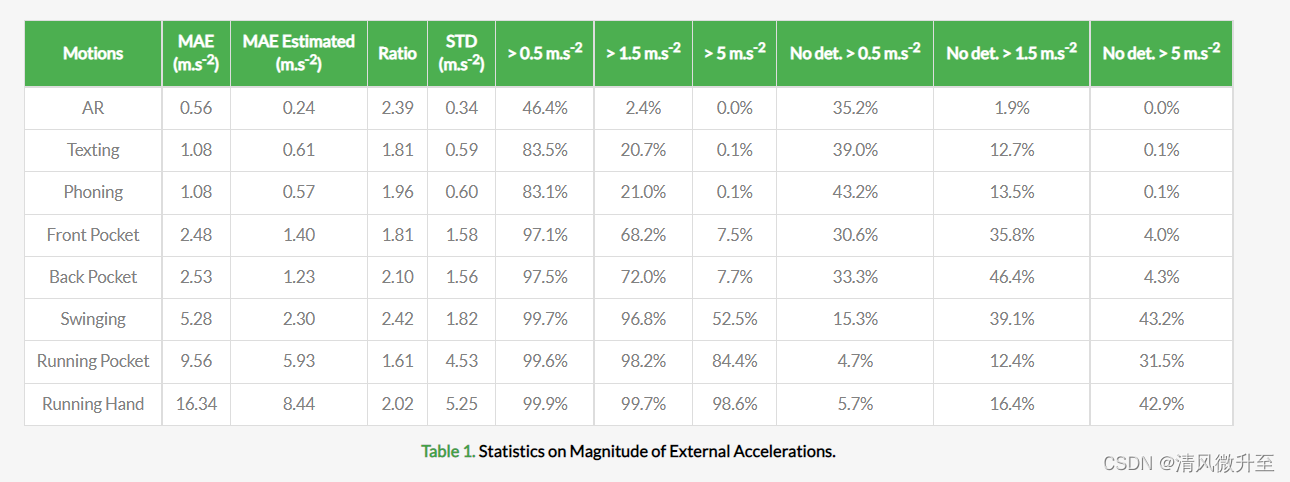
3. 不同的手势
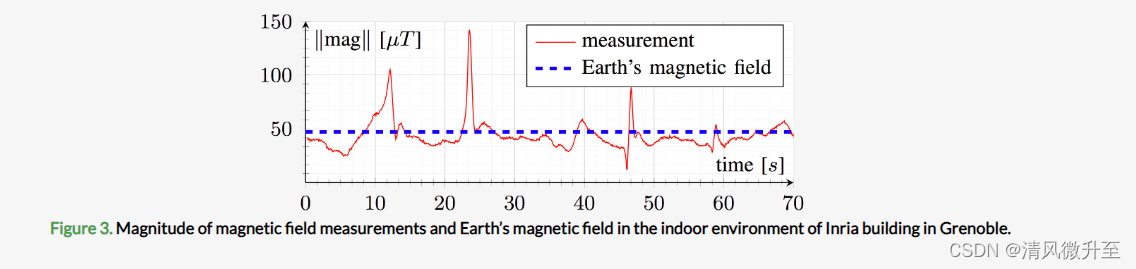
4. 磁场抗干扰
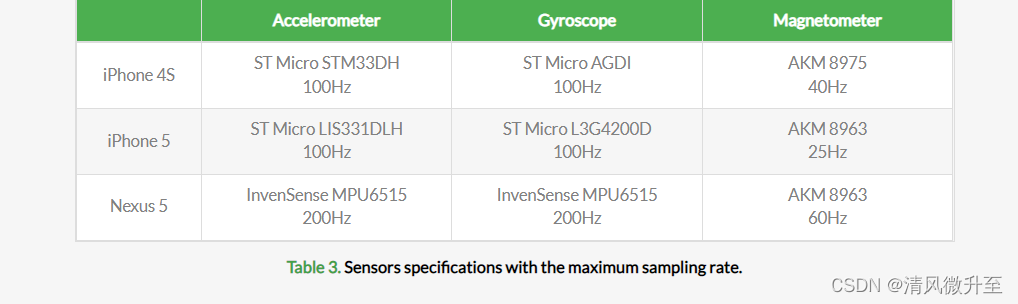
5. 不同的手机
6. 所涉及的算法
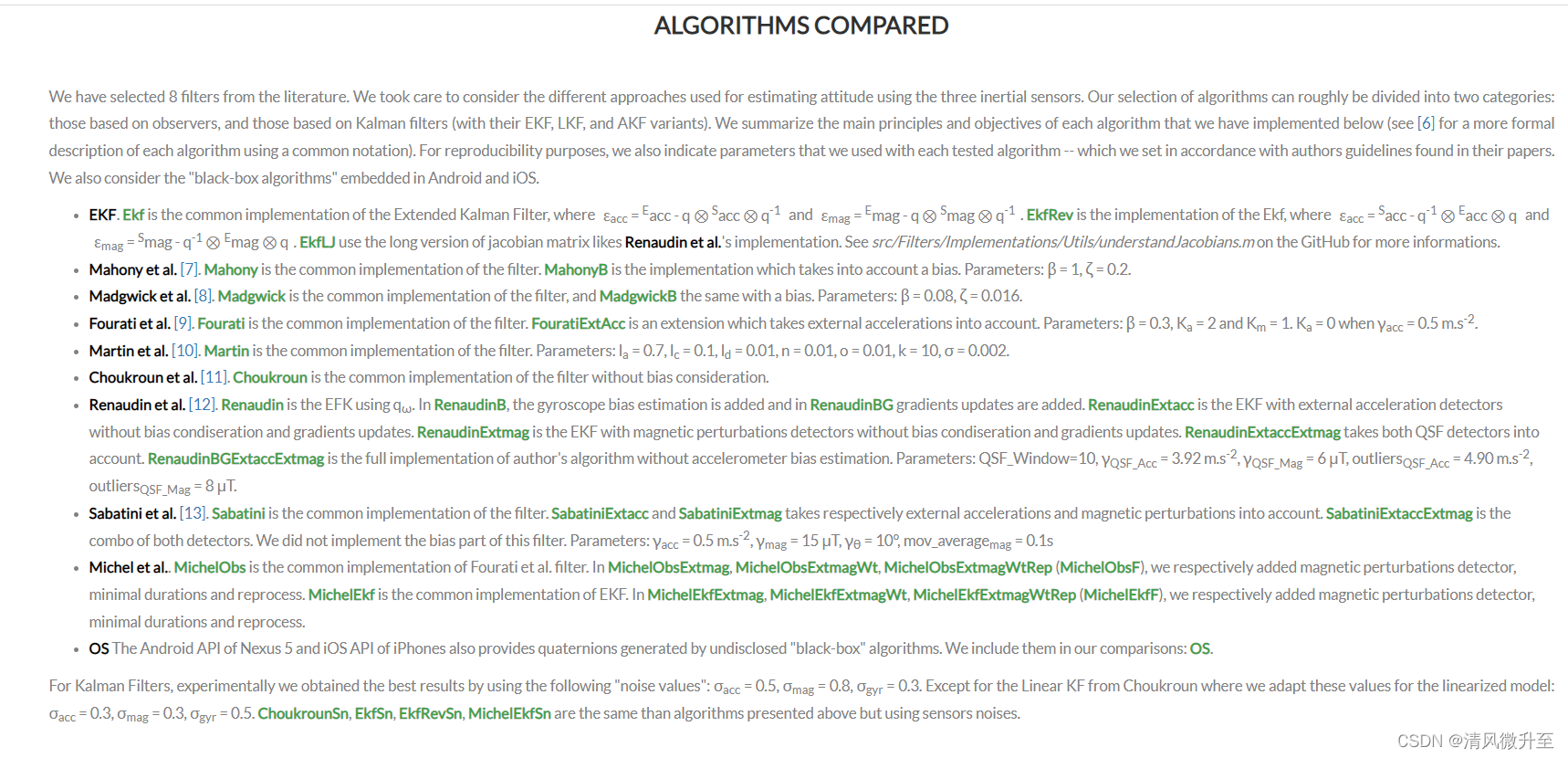
EKF
Mahony
Madgwick
Fourati
Martin
Choukroun
Renaudin
Sabatini
Michel
OS The Android API of Nexus 5 and iOS API of iPhones also provides quaternions generated by undisclosed “black-box” algorithms. We include them in our comparisons: OS.

















 250
250

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









