







The Principles
We use"I" to represent the image and shift the image by (x,y)
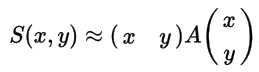
SSD(weighted sumof squared differences ) is represented by "S" :

A corner (orinterest point) is characterized by large S in all directions of the vectors (x,y).
(Use Taylorexpansion)
(We often use [-2 -1 0 1 2] filterto get Ix.)

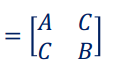
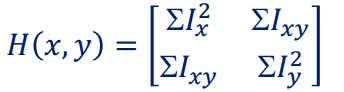
(This matrix iscalled Harris Matrix.)
We should use this Matrix to determine whether S is large in all direction vectors, furthermore judge the corners.
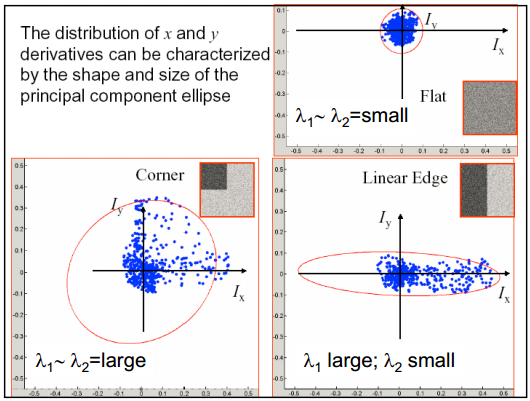
Now we consider the distributions of Ix and Iy for different cases.
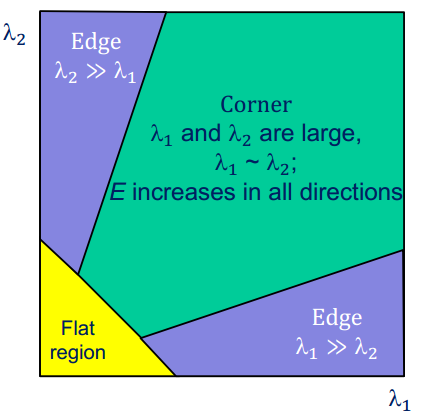
We don't need to calculate the exact eigenvalues
We just use "Function for corner detection"
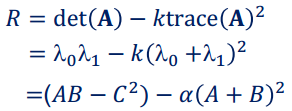
(α = 0.04 ~ 0.06)
Harris Corner Detection Algorithm
1. Compute Ix and Iy using [-2 -1 0 1 2] or [-1 0 1].
2. Calculate

3. Over a window, calculate
4. Get the Harris Matrix
5. Compute "R"
6. Threshold on the value R
7. Perform non-maximum supression
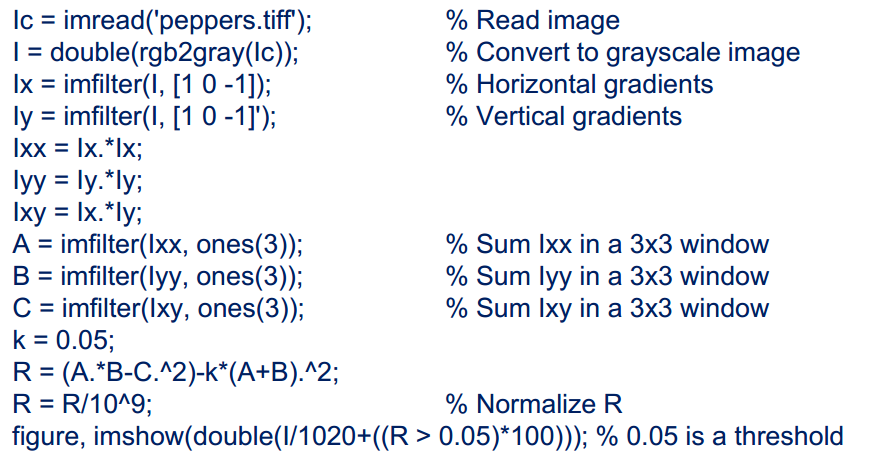
An example















 1747
1747

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









