



近期在开发外骨骼机器人,外骨骼机器人的运动控制可以简单分为两个层次,首先助力策略,即输出力到状态空间的映射;
其次是驱动器跟随,虽然电机作为驱动器的输出跟随是比较成熟的,但是目前各种机器人均在开发新的驱动系统(所有非直驱方案),常见的如同气动,鲍登线,连杆传动等。新的驱动系统一般是具有更轻量化,能量密度更高的特点。但是如何对这些驱动系统进行控制是是否可以达到对整个机器人精确控制的一个重要的难点。
本文记录了我在开发基于鲍登线驱动的外骨骼的实现力控过程中的解决思路
首先是如何实现力控
最开始是我是关于调试一个力控系统的输出的一些小想法:
力控的定义:电机驱动鲍登线拉动负载运动,此时在负载和鲍登线中间添加一个力传感器作为反馈,此时真实拉力能够跟随所需拉力;
首先分析:力的电流和力矩的关系为线性,T=ki k是扭矩常数。 该力矩作用于电机本身,电机本身一般带有一个减速箱,以轴后角度,角速度,角加速度为为状态;电机等效的转动惯量 J2=J1K^2 K为减速比,加上线管上的阻尼
因此输入电流生成的力矩成为了惯性力 阻尼和外界输出力;
从上述原理可得,如果我们可以建立建立先验模型,标定参数,那就可以对该系统进行无滞后的跟踪………吗?
如果要标定参数:第一步是固定拉线末端,将轴后角度,角速度,角加速度都设置为0,获得I和F的系数K;其次是匀速旋转,获得等效阻尼系数;然后匀加速 获得等效转动惯量
然而上述的所有都需要有一个稳定的外界输出用来完成匀速运动,匀加速运动。几乎大家应该都没有这些设备吧……
于是我准备先用仅考虑力的电流和力矩的关系为线性作为先验模型的pid进行调节,
第一步:标定T=k*i 中的k,当我输入相同的电流,但是发现力传感器的数值随着线管的位置不断变化的时候,我觉得哪里不对劲起来。
现象:当电流保持不变,任何线管位置的变化都会引起力传感器读书的变化,变化范围极大,从3N到8N,因此难以标定K(或者对现在的我来说,准确标定的难度较大,最多是当成一个可以调节的参数,对其调节看看效果)
结论:线管本身对拉力的影响很大,如果没有一定规范下,比如:1、规范化接头结构 保证力传输的方向;2、固定线管 保证线管接口干净整齐,呈喇叭口等安装设计规范,做先验标定的效果意义不大,因为线管本身对拉力的影响远大于先验的变化。
第二步:调节pid
使用设备:大疆开发板a型,串口调试工具,VOFA+串口调试工具
数据传输逻辑:板卡通过串口6读取力传感器数据,板卡通过pid计算出需要设置的电流,并通过串口7发送给电脑,电脑通过VOFA+以曲线形式打出来。
结论:有效,但是有一定的滞后性。结果如图: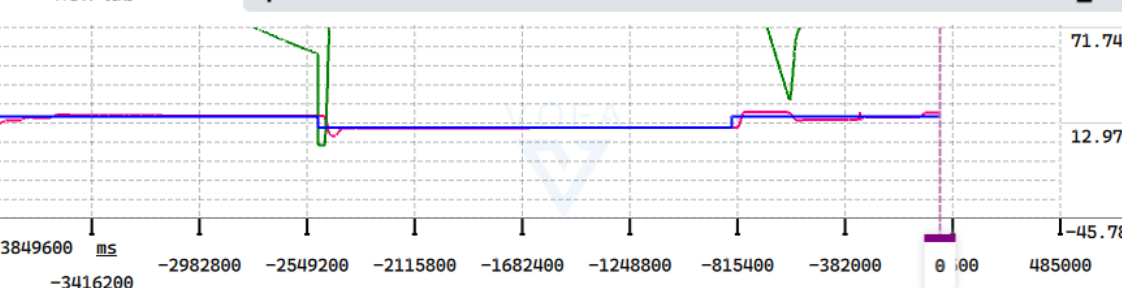
采用周期阶跃力信号给电机跟踪,实现的效果如图。稳定误差比较小,但是具有一定的滞后性,之后还会继续进行不同方式的开发,有更好的效果我会发出来
柔性外骨骼 鲍登线的力控记录
于 2025-09-26 17:12:44 首次发布

















 25
25

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









