







对GAMMA: Generalizable Articulation Modeling and Manipulation for Articulated Objects的简单理解

1. 之前工作的缺陷,本篇工作做的事
由于3D铰接物体有多样化的shape,语义类别以及运动结构,之前的工作主要注重与识别和操纵特定关节类型下的铰接物体。它们能够识别物体的关节参数,分辨合适的抓取姿态来促进运动轨迹规划,尽管这些方法在特定的铰接物体类型下取得了成功,但无法泛化到未见过的物体,严重影响了在广泛场景下的应用。
在该工作中,提出了新的泛化铰接建模和铰接物体操纵的方法。同时从不同的类别的多样化铰接物体中,学习了铰接物体建模和抓取姿态Affordance。另外,GAMMA(本篇论文工作简写)还采用适应性操纵来迭代减少建模误差,以提升操纵表现。
2. 问题定义
机器操纵任务 T T T被如下定义:
由 K K K个可移动部件组成的未知铰接物体 M = { m i } i = 1 k M=\{m_i\}^k_{i=1} M={mi}i=1k,这样的物体 M M M通过具有 N N N个点的点云 P P P表示: P = { p i ∈ R 3 } i = 1 N P=\{p_i∈\R^3\}^N_{i=1} P={pi∈R3}i=1N。
另外,从点云中建模物体结构 J J J,估计每个部件的铰接参数 J = { ψ i } i = 1 K J=\{ψ_i\}^K_{i=1} J={ψi}i=1K。大部分物体仅由一个维度的平移或转动关节组成,可以简化关节参数为 ψ i = { u i , q i , c i } ψ_i=\{u_i,q_i,c_i\} ψi={ui,qi,ci},其中 u i ∈ R 3 u_i∈\R^3 ui∈R3是joint axis的单位向量, q i ∈ R 3 q_i∈\R^3 qi∈R3是位置, c i c_i ci是关节类型。另外还用两个变量 o i ∈ R 3 o_i∈\R^3 oi∈R3和 v i ∈ R 3 v_i∈\R^3 vi∈R3表示从 p i p_i pi到质心的向量和到joint axis d i d_i di的向量。
3. 方法
GAMMA由3个模块组成:articulation modeling, part-aware grasp pose affordance和physics-guided adaptive manipulation。
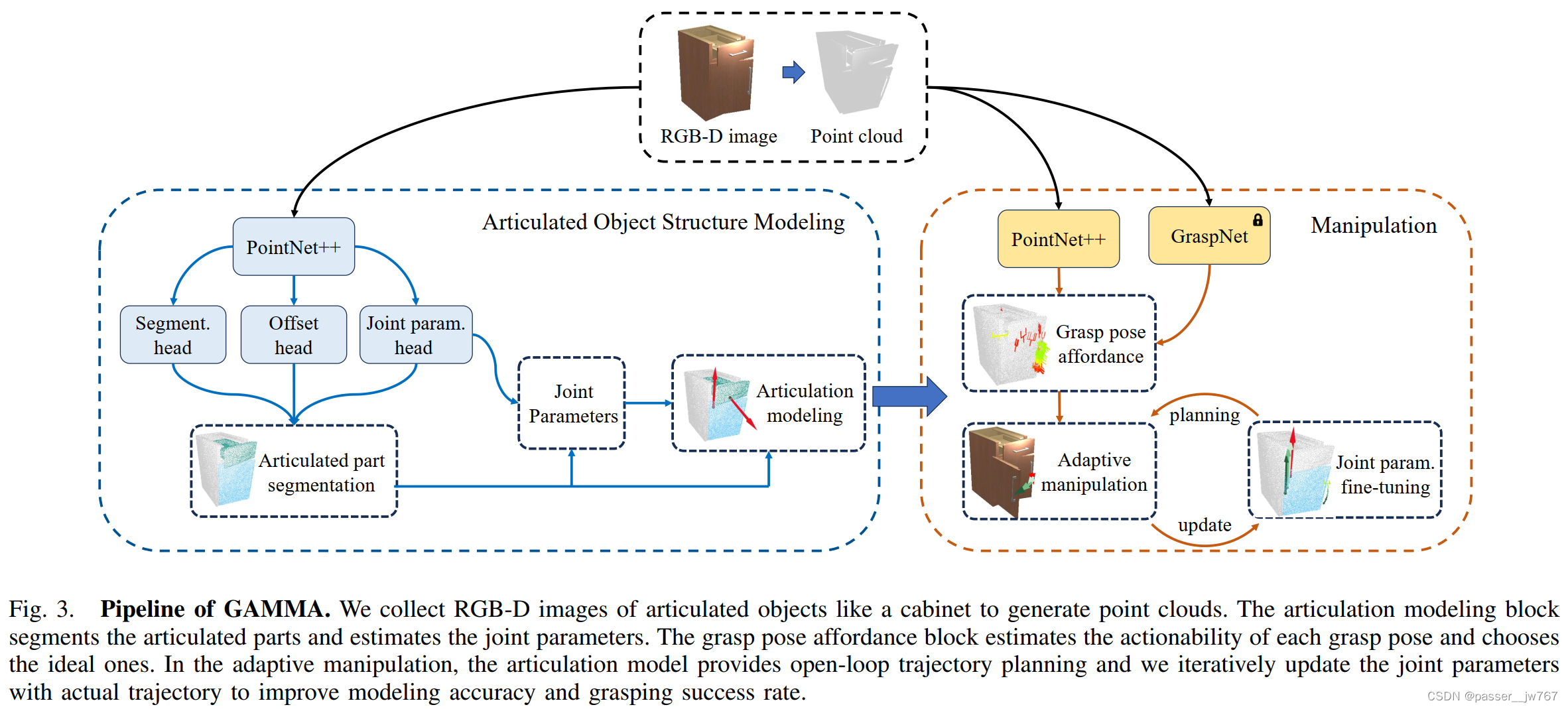
3.1 铰接建模
操纵任务中,对铰接物体结构的理解帮助可移动部件的运动学限制推理。因此,将整个物体分割成了多个独立的刚性部件,并估计每个刚性部件的铰接参数。首先使用PN++来分割点云,使用分割头、offset头、关节参数头来分别解码对应信息。对这些解码出来的信息进行监督学习。
这里感觉损失函数什么的和Command-Driven几乎一模一样。
3.2 部件感知的抓取姿态Affordance
将高维的视觉信息处理成可交互的位置。首先对每个铰接部件做如下步骤操作:
-
通过Grasp-Net生成一系列抓取姿态
-
连接PN++的全局特征 f g g f_{gg} fgg,铰接参数 f a p f_{ap} fap,接触pose特征 f g p f_{gp} fgp。利用连接特征来预测可操纵性分数,评估每个抓取姿态的可行性。
3.3 物理引导的适应性操纵
在之前章节中从点云建立了铰接模型并生成抓取姿态Affordance,并提供了运动限制。但在操纵过程中,观察仍存在不确定性和错误,使得模型预测结果不精确。为解决此问题,应用物理引导的适应性操纵,通过最小化plan和实际轨迹的误差,迭代更新铰接模型。这个过程可以帮助在未见过铰接物体的情况下,帮助改进模型的准确性。

规划抓取点在 L L L步内完成操纵任务 T T T的轨迹,在时间步 t t t中, τ t p l a n = { P i p l a n } i = 1 L \tau^{plan}_t=\{P^{plan}_i\}^L_{i=1} τtplan={Piplan}i=1L。实际操纵中,采用滚动视界控制,只执行 H ( H < L ) H(H<L) H(H<L)步规划 τ t p l a n \tau^{plan}_t τtplan。来自真实机器人操纵的结果 τ t a c t u a l = { P i p l a n } i = 1 H \tau^{actual}_t=\{P^{plan}_i\}^H_{i=1} τtactual={Piplan}i=1H。通过Hungarian算法最小化匹配矩阵 C t ∈ R H × L C_t∈\R^{H×L} Ct∈RH×L优化关节参数 ψ ψ ψ,也就是规划路径和真实路径的差异:

进而改进铰接物体的建模精确度















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









