






一、论文
- 研究领域: 点云配准 | 有监督 部分重叠
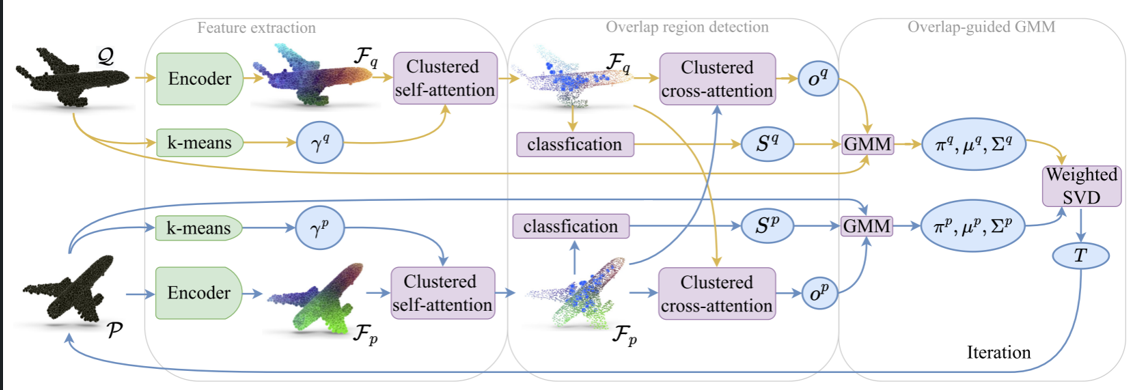
- 论文:Overlap-guided Gaussian Mixture Models for Point Cloud Registration
-
WACV 2023
二、概述
- 概率3D点云配准方法在克服噪声、异常值和密度变化方面表现出有竞争力的性能。本文将点云对的配准问题转化为两个高斯混合物的配准问题,通过最小化两个相应混合物之间的统计差异度量。
- baseline: DeepGMR
- backbone: DGCNN特征提取器
- OGMM可以更好地检测重叠区域,这要归功于新引入的重叠分数(借鉴2021 CVPR Predator)
三、详述
点云配准方法可以大致分为无对应和基于对应[28]。
- 无对应配准方法旨在最小化从两个输入点云提取的全局特征之间的差异[28,18,1]。这些全局特征通常基于点云的所有点来计算,使得无对应性方法不足以处理具有部分重叠的场景,例如在真实的世界中捕获的场景[51,6]。
- 基于对应关系的配准方法依赖于两个输入点云之间的点级对应关系[10,39,2]。尽管显示出有希望的结果,但这些方法遭受两个主要挑战:i)由于传感器噪声和密度变化,真实世界的点云不包含精确的点级对应关系[17,49,36]; ii)对应搜索空间的大小随着两个点云的点的数量二次增加[49]。
找到点对点对应的另一种方法是通过概率模型使用分布到分布的匹配[17,49]。这些概率配准技术比它们的点对点对应物显示出对噪声和密度变化的更大鲁棒性[36],然而,它们通常要求它们的输入共享相同的分布参数(例如,高斯混合模型)。因此,它们只能处理完全到完全[49]或部分到完全[36]的点云配准设置。在现实世界应用中典型的部分到部分设置可能具有不相交的分布参数。因此,当在这些设置中使用最先进的方法时,极有可能表现不佳。
完全到完全:

部分到完全:

部分到部分:















 4967
4967











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









