







CoFiNet[1]是去年挂在Arxiv上的文章,当时没有来得及仔细研究,时隔大半年,仔细研究一下这篇文章。
Contribution
- 提出一种不需要检测关键点的(detection-free)的coarse-to-fine点云配准框架;
- 提出一种加权方案(weighting scheme),在coarse scale下引导模型学习匹配经过下采样后的均匀分布的nodes,显著减小了后续进一步优化点对匹配关系的搜索空间;
- 提出一种可微(differentiable)的密度自适应匹配模块,采用最优传输理论(sinkhorn)优化point-level的点对匹配关系。
CoFiNet核心思路是基于corase-to-fine思想,这一匹配范式被广泛应用于2D图像匹配,其中有如LoFTR[2]等工作,均是采用一种先在coarse-level上得到粗略点对匹配结果,再在fine-level上进行点对匹配关系的进一步优化,模型最终输出经过优化后的匹配关系的思想。整体结构如下图:

左侧为模型整体pipeline,右侧为CPB与CRB模块的具体操作流程图。整个网络分成Coarse scale与Finer scale两个部分,整体遵循encoder-decoder的全卷积架构。接下来进行各个模块的详细介绍。
Method
Coarse-scale Matching
即图的上半部分,主要由encoder,attention及optimal transport三个部分组成:
Point Encoding
对于点云输入
P
X
∈
R
n
×
3
,
P
Y
∈
R
m
×
3
{P_X} \in {R^{n \times 3}},{P_Y} \in {R^{m \times 3}}
PX∈Rn×3,PY∈Rm×3,采用KPConv[3]进行特征提取,这里的KPConv结构已经被众多点云配准网络使用,如D3Feat[4],PREDATOR[5],Lepard[6],NgeNet[7]等等,这里不过多赘述。
经过encoder至bottleneck时,输出经过下采样后的点node
P
X
′
∈
R
n
′
×
3
,
P
Y
′
∈
R
m
′
×
3
{P'_X} \in {R^{n' \times 3}},{P'_Y} \in {R^{m' \times 3}}
PX′∈Rn′×3,PY′∈Rm′×3及其对应特征node feature
F
X
′
∈
R
n
′
×
b
,
F
Y
′
∈
R
m
′
×
b
{F'_X} \in {R^{n' \times b}},{F'_Y} \in {R^{m' \times b}}
FX′∈Rn′×b,FY′∈Rm′×b(b=256),即如下过程:
P
X
→
P
′
X
,
F
′
X
P
Y
→
P
′
Y
,
F
′
Y
\begin{array}{l} {P_X} \to {{P'}_X},{{F'}_X}\\ {P_Y} \to {{P'}_Y},{{F'}_Y} \end{array}
PX→P′X,F′XPY→P′Y,F′Y
P X ′ , P Y ′ {P'_X},{P'_Y} PX′,PY′被称为node,为输入点云经过下采样后得到的处于coarse-level上的点,也可以称为superpoint。每个经过下采样得到的node表征了原输入点云一个小patch上的所有信息。
Attentional Feature Aggregation
对于得到的node
P
X
′
,
P
Y
′
{P'_X},{P'_Y}
PX′,PY′及其特征
F
X
′
,
F
Y
′
{F'_X},{F'_Y}
FX′,FY′,进行self-,cross-,self-attention的特征聚合。目前在全卷积网络中,在bottleneck处进行attention操作已经是一个十分常见的操作,self-attention用于进一步扩大特征
F
X
′
,
F
Y
′
{F'_X},{F'_Y}
FX′,FY′在自身点云
X
X
X与
Y
Y
Y中的感受野,cross-attention用于
F
X
′
,
F
Y
′
{F'_X},{F'_Y}
FX′,FY′之间的信息交互。
F
′
X
→
F
~
′
X
F
′
Y
→
F
~
′
Y
\begin{array}{l} {{F'}_X} \to {{\tilde F'}_X}\\ {{F'}_Y} \to {{\tilde F'}_Y} \end{array}
F′X→F~′XF′Y→F~′Y
Correspondences Proposal
进一步利用经过信息交互的node feature
F
~
X
′
,
F
~
Y
′
{\tilde F'_X},{\tilde F'_Y}
F~X′,F~Y′进行coarse-level上的特征匹配,获得node-level的点对匹配关系。并以此作为基础,后续在finer-level上进一步得到point-level的匹配关系。
具体做法是利用
F
X
′
,
F
Y
′
{F'_X},{F'_Y}
FX′,FY′,构造相似度矩阵(similarity matrix),接着进行SuperGlue[8]-style的sinkhorn迭代得到node与node之间匹配的置信度矩阵(confidence matrix),sinkhorn的具体细节可以看SuperGlue原文。
- 在训练阶段,在 P X ′ , P Y ′ {P'_X},{P'_Y} PX′,PY′中随机选择128对gt node correspondence,利用其node feature构造confidence matrix(128x128),再利用GT confidence matrix对confidence matrix进行监督,得到的node correspondences是固定的128对;
- 在测试阶段选取confidence>threshold(0.2)的匹配对作为coarse-level得到的node correspondences,数目不固定,若数目<200,则thres-=0.01,不断循环直至node correspondences数目>=200.
经过以上步骤,得到node correspondences集合 C ′ = { ( P ′ X ( i ′ ) , P ′ Y ( j ′ ) ) } C' = \left\{ {\left( {{{P'}_X}\left( {i'} \right),{{P'}_Y}\left( {j'} \right)} \right)} \right\} C′={(P′X(i′),P′Y(j′))}.
Point-level Refinement
Node Decoding
即全卷积网络中的decoder部分,以node feature F ~ X ′ , F ~ Y ′ {\tilde F'_X},{\tilde F'_Y} F~X′,F~Y′ 作为输入,输出point-level feature F X ∈ R n × c , F Y ∈ R m × c {F_X} \in {R^{n \times c}},{F_Y} \in {R^{m \times c}} FX∈Rn×c,FY∈Rm×c(c=32).
Point-to-node Grouping
为了优化node-level的correspondences,需要将其拓展成point-level的correspondences,如何联系起point与node?这里采用一种point-to-node grouping策略,简单来说就是将每个point分配(assign)给距离自己最近的那个node,相较于以node为中心进行KNN以建立node与point之间的关联,point-to-node的优势有以下几点:
- 每个point都会得到分配,且分配到的node是唯一的;
- 具有密度自适应性;
经过grouping操作,对于集合
C
′
C'
C′中的每个node
P
X
′
(
i
′
)
{P'_X}\left( {i'} \right)
PX′(i′),都被分类了一定数量的point,这些point构成了针对于此node的一个patch
G
i
′
{G_{i'}}
Gi′,对于每个patch,能够容纳的point数目是固定的,文中设为64,若点数超过64则进行截断即可。
对point与feature进行grouping,得到patch:
G
i
′
P
=
{
p
∈
P
X
∣
∥
p
−
P
′
X
(
i
′
)
∥
≤
∥
p
−
P
′
X
(
j
′
)
∥
,
∀
j
′
≠
i
′
}
G
i
′
F
=
{
f
∈
F
X
∣
f
↔
p
w
i
t
h
p
∈
G
i
′
P
}
\begin{array}{l} G_{i'}^P = \left\{ {\left. {p \in {P_X}} \right|\left\| {p - {{P'}_X}\left( {i'} \right)} \right\| \le \left\| {p - {{P'}_X}\left( {j'} \right)} \right\|,\forall j' \ne i'} \right\}\\ G_{i'}^F = \left\{ {\left. {f \in {F_X}} \right|f \leftrightarrow p{\rm{ }}with{\rm{ }}p \in G_{i'}^P} \right\} \end{array}
Gi′P={p∈PX∣∥p−P′X(i′)∥≤∥p−P′X(j′)∥,∀j′=i′}Gi′F={f∈FX∣f↔pwithp∈Gi′P}
通过grouping操作,将node correspondences拓展成patch correspondences,patch与patch之间在欧氏空间与特征空间分别构成相应集合,即
C
P
=
{
(
G
i
′
P
,
G
j
′
P
)
}
,
C
F
=
{
(
G
i
′
F
,
G
j
′
F
)
}
{C_P} = \left\{ {\left( {G_{i'}^P,G_{j'}^P} \right)} \right\},{C_F} = \left\{ {\left( {G_{i'}^F,G_{j'}^F} \right)} \right\}
CP={(Gi′P,Gj′P)},CF={(Gi′F,Gj′F)}.
Density-adaptive Matching
接着对每一个patch correspondences提取point-level的点对对应关系,此时可以直接使用此前coarse-level使用过的SuperGlue-style的sinkhorn迭代以生成correspondences,但是由于patch中存在点数分布不均的情况(即并不是每个patch都包含64个点),
举个例子,假如
G
i
′
P
{G_{i'}^P}
Gi′P只包含48个点,
G
j
′
P
{G_{j'}^P}
Gj′P包含36个点,则由
(
G
i
′
F
,
G
j
′
F
)
\left( {G_{i'}^F,G_{j'}^F} \right)
(Gi′F,Gj′F)构造得到的相似度矩阵similarity matrix(64x64)中,对于第49至64行,39至64列的这些entries都是无意义(invalid)的,直接对此矩阵使用sinkhorn会引导(bias)模型将更多的点对预测为不匹配的情况(此处本人理解能力有限,具体解释可以看原文),因此文中提出一种density-adaptive matching的方式:

具体来说,对于patch correspondence
(
G
i
′
P
,
G
j
′
P
)
,
(
G
i
′
F
,
G
j
′
F
)
\left( {G_{i'}^P,G_{j'}^P} \right),\left( {G_{i'}^F,G_{j'}^F} \right)
(Gi′P,Gj′P),(Gi′F,Gj′F),首先再次进行self-,cross-,self-attention操作以进一步在局部进行信息聚合与信息交互,接着进行RPMNet[9]-style的sinkhorn迭代,这里的density-adaptive体现在将similarity matrix中的invalid entries(即点数不足64的情况)用-∞进行屏蔽(mute),接着再进行sinkhorn迭代即可消除这些invalid entries在学习中给模型带来的影响。
经过RPMNet-style sinkhorn迭代得到point-level的confidence matrix:
- 训练阶段,使用gt confidence matrix对得到的confidence matrix进行监督;
- 测试阶段,使用non-mutual max selection从confidence matrix中选择得到point-level correspondence集合 C ~ ( l ) {\tilde C^{\left( l \right)}} C~(l).
每对patch correspondence ( G i ′ P , G j ′ P ) , ( G i ′ F , G j ′ F ) \left( {G_{i'}^P,G_{j'}^P} \right),\left( {G_{i'}^F,G_{j'}^F} \right) (Gi′P,Gj′P),(Gi′F,Gj′F)均可得到对应的point-level correspondence集合 C ~ ( l ) {\tilde C^{\left( l \right)}} C~(l),对每队patch correspondence均进行以上操作,将得到的所有point-level correspondences集合进行拼接,即可得到最终求解位姿变换所需的correspondences集合。
Pose Estimation
位姿求解仍然使用配准中被使用最多的RANSAC方法,对经过refine的point-correspondences使用RANSAC进行旋转平移变换求解。
Supervision
CoFiNet的监督分成两个部分,coarse-level与finer-level,如果对SuperGlue等工作比较了解就知道,这些通过sinkhorn迭代生成correspondences的方法,loss监督对象是confidence matrix,那么在CoFiNet中,监督对象是两个阶段得到的confidence matrices:
coarse scale loss
目的是监督node feature,对于单个patch
G
i
′
P
G_{i'}^P
Gi′P,定义visible ratio,衡量patch中overlap点所占比例:

对于patch correspondences
(
G
i
′
P
,
G
j
′
P
)
\left( {G_{i'}^P,G_{j'}^P} \right)
(Gi′P,Gj′P),定义两者之间的overlap比例:

coarse-level的gt confidence matrix由以下方式生成(注意dustbin处的gt生成):

coarse loss由SuperGlue-style sinkhorn生成的confidence matrix与以上gt confidence matrix计算得到,计算方式为加权交叉熵损失:

finer scale loss
目的是监督point feature,finer-level的gt confidence matrix由以下方式生成(注意dustbin处的gt生成):
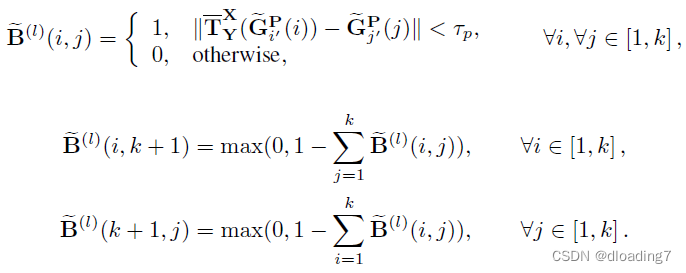
finer loss由RPMNet-style sinkhorn生成的confidence matrix与以上gt confidence matrix计算得到,同样计算方式为加权交叉熵损失:

最终total loss为两者之和: L = L c + λ L f L = {L_c} + \lambda {L_f} L=Lc+λLf.
Experiments
由于CoFiNet是detection-free的模型,首先生成coarse-correspondences,接着refine成point-correspondences,因此与之前的配准工作不同,在测试阶段不存在对src与tgt进行固定点数采样再进行配准的说法,因此为了在测试阶段与先前的工作保持一致,CoFiNet中的“固定点数采样”定义为对最终生成的point-correspondences进行采样,即“采样5000点”等价于在CoFiNet中采样5000对point-correspondences,采样使用概率采样probablistically sampling,每对correspondences被采样到的概率正比于:
c
g
l
o
b
a
l
=
c
f
i
n
e
⋅
c
c
o
a
r
s
e
{c_{global}} = {c_{fine}} \cdot {c_{coarse}}
cglobal=cfine⋅ccoarse
其中 c c o a r s e {c_{coarse}} ccoarse与 c f i n e {c_{fine}} cfine分别代表coarse-level与finer-level阶段得到的node confidence与point confidence.
模型默认训练150epochs,时间太久,这里选择使用训练了30个epoch的保存模型model_best_matching_recall.pth进行测试,
实验结果如下(open3d 0.9.0):
| Dataset -> 3DMatch | 5000 | 2500 | 1000 | 500 | 250 |
|---|---|---|---|---|---|
| metric | IR | IR | IR | IR | IR |
| PREDATOR (paper) | 58.0 | 58.4 | 57.1 | 54.1 | 49.3 |
| CoFiNet (paper) | 49.8 | 51.2 | 51.9 | 52.2 | 52.2 |
| pretrained weights | 49.9 | 51.2 | 52.0 | 52.3 | 52.1 |
| model_best_matching_recall.pth (30 epochs) | 50.0 | 51.0 | 51.5 | 51.7 | 51.8 |
| metric | FMR | FMR | FMR | FMR | FMR |
| PREDATOR (paper) | 96.6 | 96.6 | 96.5 | 96.3 | 96.5 |
| CoFiNet (paper) | 98.1 | 98.3 | 98.1 | 98.2 | 98.3 |
| pretrained weights | 98.1 | 98.3 | 98.0 | 98.3 | 98.3 |
| model_best_matching_recall.pth (30 epochs) | 97.6 | 97.4 | 97.4 | 97.8 | 97.3 |
| metric | RR | RR | RR | RR | RR |
| PREDATOR (paper) | 89.0 | 89.9 | 90.6 | 88.5 | 86.6 |
| CoFiNet (paper) | 89.3 | 88.9 | 88.4 | 87.4 | 87.0 |
| pretrained weights | 88.0 | 87.6 | 87.4 | 86.7 | 85.1 |
| model_best_matching_recall.pth (30 epochs) | 87.4 | 87.1 | 87.6 | 85.6 | 86.4 |
| Dataset -> 3DLoMatch | 5000 | 2500 | 1000 | 500 | 250 |
|---|---|---|---|---|---|
| metric | IR | IR | IR | IR | IR |
| PREDATOR (paper) | 26.7 | 28.1 | 28.3 | 27.5 | 25.8 |
| CoFiNet (paper) | 24.4 | 25.9 | 26.7 | 26.8 | 26.9 |
| pretrained weights | 24.4 | 25.8 | 26.7 | 26.9 | 27.0 |
| model_best_matching_recall.pth (30 epochs) | 24.8 | 25.8 | 26.5 | 26.6 | 26.9 |
| metric | FMR | FMR | FMR | FMR | FMR |
| PREDATOR (paper) | 78.6 | 77.4 | 76.3 | 75.7 | 75.3 |
| CoFiNet (paper) | 83.1 | 83.5 | 83.3 | 83.1 | 82.6 |
| pretrained weights | 83.1 | 83.0 | 82.9 | 82.8 | 82.4 |
| model_best_matching_recall.pth (30 epochs) | 81.4 | 82.0 | 82.2 | 81.5 | 82.3 |
| metric | RR | RR | RR | RR | RR |
| PREDATOR (paper) | 59.8 | 61.2 | 62.4 | 60.8 | 58.1 |
| CoFiNet (paper) | 67.5 | 66.2 | 64.2 | 63.1 | 61.0 |
| pretrained weights | 62.3 | 62.6 | 62.0 | 60.9 | 58.1 |
| model_best_matching_recall.pth (30 epochs) | 60.2 | 60.5 | 59.8 | 59.5 | 57.0 |
Conclusion
- 根据以上表格结果,CoFiNet的复现结果除了在3DLoMatch benchmark上的RR结果相较于文章中较低以外,其余部分大致能与文章中给出数字保持一致;
- CoFiNet是点云配准中第一个使用coarse-to-fine思想的工作,对以后的工作具有不小的启发意义,最直接的就是CVPR2022中的另一个工作GeoFormer[10],同样是基于以上思想;
- 基于Sinkhorn迭代方式生成correspondences的方式相比于普通的feature-matching方式确实更为优雅。
PS
在代码实现中,发现有两个点比较有意思,第一是coarse-level的gt confidence matrix的生成方式并不是完全与文章中给出的方式一致,即:

而实际代码中,对于
r
(
i
′
,
j
′
)
r\left( {i',j'} \right)
r(i′,j′)的计算与论文中给出的式(4)还是存在一些出入,从具体代码中可知,
r
(
i
′
,
j
′
)
r\left( {i',j'} \right)
r(i′,j′)的实际计算方式为:
r
(
i
′
,
j
′
)
=
∣
{
p
∈
G
i
′
P
,
q
∈
G
j
′
P
∣
s
.
t
.
∥
T
ˉ
Y
X
(
p
)
−
q
∥
≤
τ
p
}
∣
∣
{
p
∈
G
i
′
P
,
q
∈
P
Y
∣
s
.
t
.
∥
T
ˉ
Y
X
(
p
)
−
q
∥
≤
τ
p
}
∣
r\left( {i',j'} \right) = \frac{{\left| {\left\{ {\left. {p \in G_{i'}^P,q \in G_{j'}^P} \right|s.t.\left\| {\bar T_Y^X\left( p \right) - q} \right\| \le {\tau _p}} \right\}} \right|}}{{\left| {\left\{ {\left. {p \in G_{i'}^P,q \in {P_Y}} \right|s.t.\left\| {\bar T_Y^X\left( p \right) - q} \right\| \le {\tau _p}} \right\}} \right|}}
r(i′,j′)=∣∣{p∈Gi′P,q∈PY∣∣s.t.∥∥TˉYX(p)−q∥∥≤τp}∣∣∣∣{p∈Gi′P,q∈Gj′P∣∣s.t.∥∥TˉYX(p)−q∥∥≤τp}∣∣
并且对于以上gt confidence matrix
W
′
(
i
′
,
j
′
)
W'\left( {i',j'} \right)
W′(i′,j′)的
i
′
≤
n
′
∧
j
′
≤
m
′
i' \le n' \wedge j' \le m'
i′≤n′∧j′≤m′处,
W
′
(
i
′
,
j
′
)
W'\left( {i',j'} \right)
W′(i′,j′)的实际取值方式为:
min
(
r
(
i
′
,
j
′
)
∗
r
(
i
′
)
,
r
(
j
′
,
i
′
)
∗
r
(
j
′
)
)
\min \left( {r\left( {i',j'} \right) * r\left( {i'} \right),r\left( {j',i'} \right) * r\left( {j'} \right)} \right)
min(r(i′,j′)∗r(i′),r(j′,i′)∗r(j′))
第二点是关于sinkhorn代码的实现,整体模型一共有两处需要使用sinkhorn迭代,一处是corase-scale的correspondences proposal处,一处是density-adaptive matching处,那么观察CoFiNet的代码可以发现,在以上两处作者选择了两种sinkhorn的实现方式,前者使用的是SuperGlue式sinkhorn,后者使用的是RPMNet式sinkhorn,两种实现方式其实是有一些差别的,具体为何在两处使用不同方式的sinkhorn迭代实现,目前尚且没有找到原因,可能得等作者自己在issue中回应。
References
[1] Yu H, Li F, Saleh M, et al. Cofinet: Reliable coarse-to-fine correspondences for robust pointcloud registration[J]. Advances in Neural Information Processing Systems, 2021, 34: 23872-23884.
[2] Sun J, Shen Z, Wang Y, et al. LoFTR: Detector-free local feature matching with transformers[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2021: 8922-8931.
[3] Thomas H, Qi C R, Deschaud J E, et al. Kpconv: Flexible and deformable convolution for point clouds[C]//Proceedings of the IEEE/CVF international conference on computer vision. 2019: 6411-6420.
[4] Bai X, Luo Z, Zhou L, et al. D3feat: Joint learning of dense detection and description of 3d local features[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020: 6359-6367.
[5] Huang S, Gojcic Z, Usvyatsov M, et al. Predator: Registration of 3d point clouds with low overlap[C]//Proceedings of the IEEE/CVF Conference on computer vision and pattern recognition. 2021: 4267-4276.
[6] Li Y, Harada T. Lepard: Learning partial point cloud matching in rigid and deformable scenes[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2022: 5554-5564.
[7] Zhu L, Guan H, Lin C, et al. Neighborhood-aware Geometric Encoding Network for Point Cloud Registration[J]. arXiv preprint arXiv:2201.12094, 2022.
[8] Sarlin P E, DeTone D, Malisiewicz T, et al. Superglue: Learning feature matching with graph neural networks[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020: 4938-4947.
[9] Yew Z J, Lee G H. Rpm-net: Robust point matching using learned features[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2020: 11824-11833.
[10] Qin Z, Yu H, Wang C, et al. Geometric transformer for fast and robust point cloud registration[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2022: 11143-11152.















 1076
1076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









