







这是我碰到的一些新概念的记录,很可能是错的,请辩证的看…
- 紧集(compact set)
理解:紧集就是有界闭集 - 有效约束(active constraint)
理解:在优化中可能有很多约束条件,有的约束条件在优化的过程中起到了约束的作用,这个约束条件就可以理解为有效约束. - 仿射变换(affine transformation)
理解:在控制中一般需要把被控对象的状态驱动到一个设定的参考点 r r r,为了方便陈述?,文献中一般都说把被控对象的状态驱动到原点,其实, r r r和原点是等价的,只是需要进行坐标变换,说的数学一点,就是仿射变换. - 正不变集(positive invariant set)
参考链接
给定一个动态系统: x ˙ = f ( x ) \dot{x}=f(x) x˙=f(x)
设:系统运动轨迹为 x ( t , x 0 ) x(t, x_0) x(t,x0),其中 x 0 x_0 x0是初始点。
假设存在一个集合 O = { x ∈ R n ∣ ϕ ( x ) = 0 } O = \{ x\in \mathbb{R}^n | \phi(x) = 0 \} O={x∈Rn∣ϕ(x)=0},其中 ϕ ( x ) \phi(x) ϕ(x)是一个实函数。
如果集合满足:初始点 x 0 ∈ O x_0\in O x0∈O,且对于 ∀ t ≥ 0 \forall t \geq 0 ∀t≥0有 x ( t , x 0 ) ∈ O x(t, x_0) \in O x(t,x0)∈O。则称集合O是一个正不变集。 - 控制利亚步诺夫函数(control Lyapunov function)
维基百科
In control theory, a control-Lyapunov function is a Lyapunov function V(x) for a system with control inputs. The ordinary Lyapunov function is used to test whether a dynamical system is stable (more restrictively, asymptotically stable). That is, whether the system starting in a state x≠0 in some domain D will remain in D, or for asymptotic stability will eventually return to x=0. The control-Lyapunov function is used to test whether a system is feedback stabilizable, that is whether for any state x there exists a control u(x,t) such that the system can be brought to the zero state by applying the control u.

- 一致完全可控(uniformly complete controllable)
百度文库PPT



- 一致完全可观(uniformly complete observable)
百度文库PPT

- 多胞(polytopic)
我目前的认知是多胞和多胞不确定性有关系.应该是在鲁棒控制中.如下图所示, 红点表示实际的参数,但是是未知的,且是确定的,我们只知道六角型的顶点的参数,所以红点的不确定可以用多胞来表示.
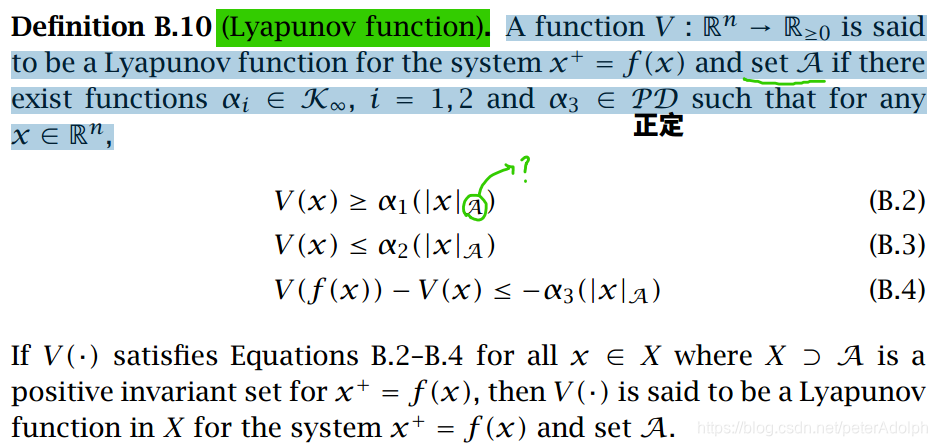
- 李亚普诺夫方程(Lyapunov function)
形如 A X + X A T = − C AX+XA^T = -C AX+XAT=−C 的关于 X X X的方程. - 李亚普诺夫函数(Lyapunov function)
-
κ
∞
\kappa_{\infty}
κ∞函数















 304
304











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









