







个人博客Glooow,欢迎各位老师来踩踩
1. 系统模型
考虑一个控制系统
x
˙
(
t
)
=
f
(
x
(
t
)
)
\dot{x}(t)=f(x(t))
x˙(t)=f(x(t))
其中
f
(
0
)
=
0
f(0)=0
f(0)=0。
2. 基本定义
正极限点(positive limit point):p 被称为 x ( t ) x(t) x(t) 的正极限点,如果存在一个时间序列 { t n } \{t_n\} {tn},有 n → ∞ n\to\infty n→∞ 时 t n → ∞ t_n\to\infty tn→∞,且使得 x ( t n ) → ∞ x(t_n)\to\infty x(tn)→∞ 随着 n → ∞ n\to\infty n→∞。
正极限集(positive limit set): x ( t ) x(t) x(t) 的所有正极限点的集合即为正极限集。
Remarks:这里举个例子,序列 x ( n ) = 1 , − 1 , 1 , − 1 , . . . x(n)=1,-1,1,-1,... x(n)=1,−1,1,−1,...,那么取奇数项时极限为 1,偶数项时极限为 -1.但是对于完整的序列 x ( n ) x(n) x(n) 则极限不存在,而 x ( n ) x(n) x(n) 的正极限集则为 { 1 , − 1 } \{1,-1\} {1,−1}。
为什么这里会引入集合呢?因为控制系统中最终的稳定状态可能不是一个孤立的点,而是在很多个状态之间循环转换,比如一个单位圆。
不变集(invariant set):集合 M M M 是关于系统 (1) 的不变集,如果有 x ( 0 ) ∈ M ⇒ x ( t ) ∈ M , ∀ t ∈ R x(0)\in M \Rightarrow x(t)\in M, \forall t\in \mathbb{R} x(0)∈M⇒x(t)∈M,∀t∈R。如果有 x ( 0 ) ∈ M ⇒ x ( t ) ∈ M , ∀ t ≥ 0 x(0)\in M \Rightarrow x(t)\in M, \forall t\ge0 x(0)∈M⇒x(t)∈M,∀t≥0 则称为正不变集(positive invariant set)。
3. 拉萨尔不变性原理
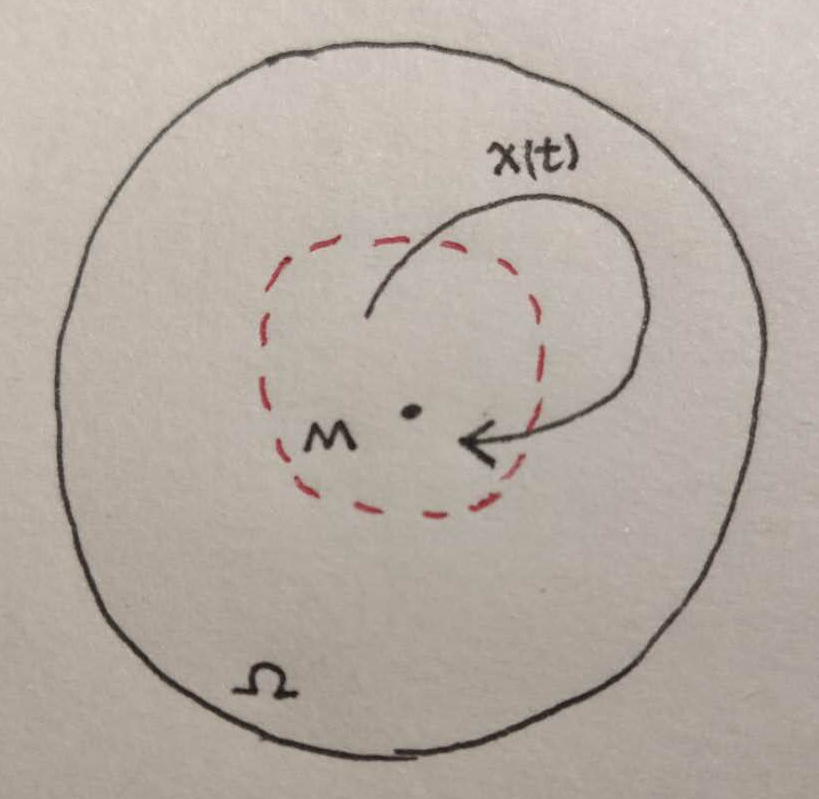
LaSalle’ Theorem:令 Ω ∈ D \Omega\in D Ω∈D 是一个紧致集,且是关于系统 x ˙ ( t ) = f ( x ( t ) ) \dot{x}(t)=f(x(t)) x˙(t)=f(x(t)) 的不变集。令 V : D → R V:D\to\mathbb{R} V:D→R 是一个连续函数,且满足 V ˙ ( x ) ≤ 0 i n Ω \dot{V}(x)\le0\ \ in\ \ \Omega V˙(x)≤0 in Ω。令 M M M 为 Ω \Omega Ω 中所有满足 V ˙ ( x ) = 0 \dot{V}(x)=0 V˙(x)=0 的点的集合,令 E E E 为 M M M 中的最大不变集,那么从 Ω \Omega Ω 中出发的所有解都将趋于 E E E 随着 t → ∞ t\to\infty t→∞。
Remarks:这里的 M M M 和 E E E 有什么不同吗?二者不等价吗?不一定等价!因为 Ω \Omega Ω 本身是一个不变集,而 M M M 又是他的一个子集,如下图所示,那么任意一个起始于 M M M 的轨迹都有可能跑出 M M M 而进入 Ω \ M \Omega\backslash M Ω\M,因此 M M M 并不是一个不变集。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









