







一、创建射线传感器
ML Agent通过一种Ray Perception Sensor来帮助智能体检测周围环境,类似于雷达。
在Hummingbird层级目录下(还是从prefabs文件夹下双击Hummingbird进入)新建一个空的游戏对象,命名为RaysForward,专门用于检测智能体前方物体。
为该对象添加一个Ray Perception Sensor 3D组件。按照下图设置参数,同时微调该游戏对象的位置,避免与智能体本身发生碰撞。
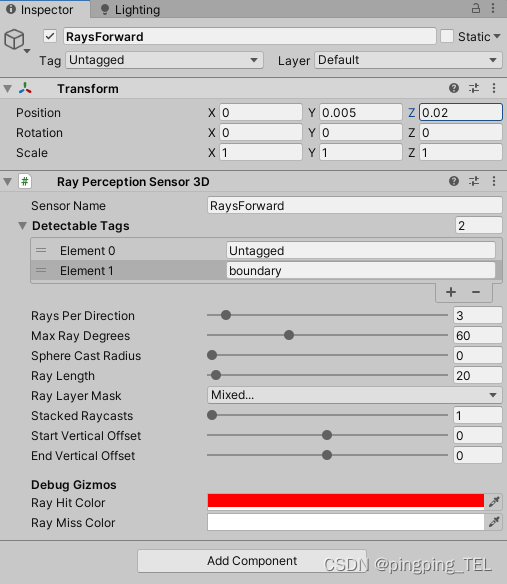
其中,主要修改传感器的名字,传感器可检测的物体的标签,每个方向射线的数量,射线的最大角度,射线长度。设置投球半径为0,即只有当射线本身投到物体上时才视为射线检测到物体,若不为0则物体进入射线末端球体内即视为检测到物体。
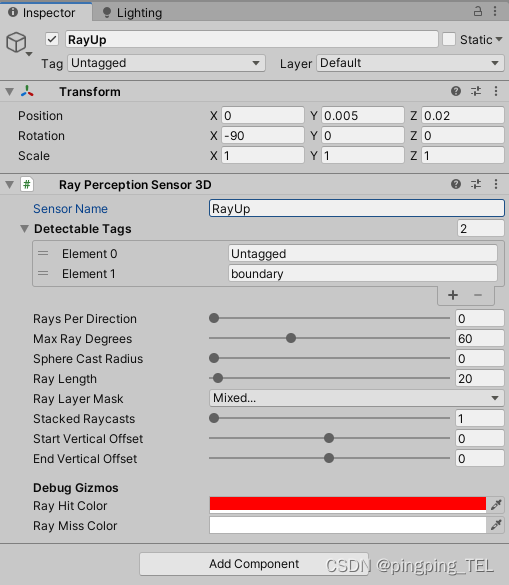
还需设置另一个传感器来检测智能体上方物体,将上一个复制,修改名字为RayUp,参数设置如下。仅保留一条射线。
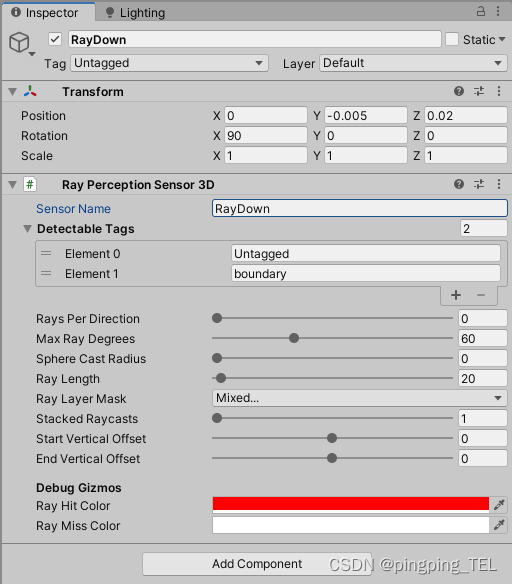
最后,再设置一个传感器来检测智能体下方物体。参数设置如下。















 569
569











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









