






四轮转向车辆与前轮转向车辆仿真对比,包含
两种转角工况,对比稳定性,
使用pid,lqr实现四轮转向控制的对比,
纯simulink版本,
有说明文档。



四轮转向车辆与前轮转向车辆仿真对比
引言:
在汽车行驶过程中,车辆的转向系统起着至关重要的作用。传统的前轮转向系统在提供良好操控性的同时,也存在一些制约因素,如转弯半径限制和车辆稳定性问题。为了克服这些问题,四轮转向系统应运而生。本文将对四轮转向车辆与前轮转向车辆进行仿真对比,并使用PID和LQR两种控制算法实现四轮转向控制,旨在探讨不同转向系统对车辆稳定性的影响,并分析两种算法的优劣。
一、四轮转向车辆与前轮转向车辆的概述
四轮转向车辆与前轮转向车辆是两种常见的转向系统。前者在车辆前轮和后轮均安装了转向机构,实现了前后轮的转向功能,而后者则只有前轮进行转向。四轮转向车辆相对于前轮转向车辆具有更小的转弯半径和更好的操控性能,但是否在稳定性上也存在差异,需要通过仿真对比来验证。
二、四轮转向车辆与前轮转向车辆的仿真对比
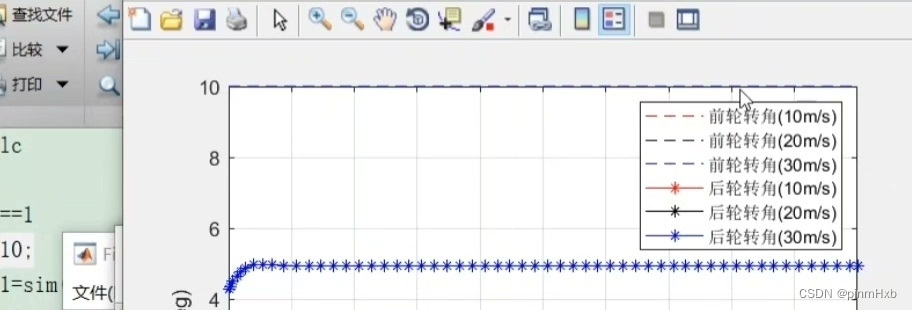
1. 转角工况比较
针对四轮转向车辆和前轮转向车辆,本文设计了两种
相关代码,程序地址:http://imgcs.cn/lanzoun/722446944346.html














 2904
2904











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









