






横列式双旋翼两轴飞行器倾转旋翼simulink
simscape仿真MATLAB 内环 外环pid控制
YID:89249668568032359
爱小马的海盐大傻
横列式双旋翼两轴飞行器是一种新型的飞行器设计,它采用了双旋翼结构和两轴控制系统,能够实现较高的机动性和稳定性。在这篇文章中,我们将围绕该飞行器的倾转旋翼、Simulink仿真和MATLAB的应用,探讨内环和外环PID控制的技术原理和实现方法。
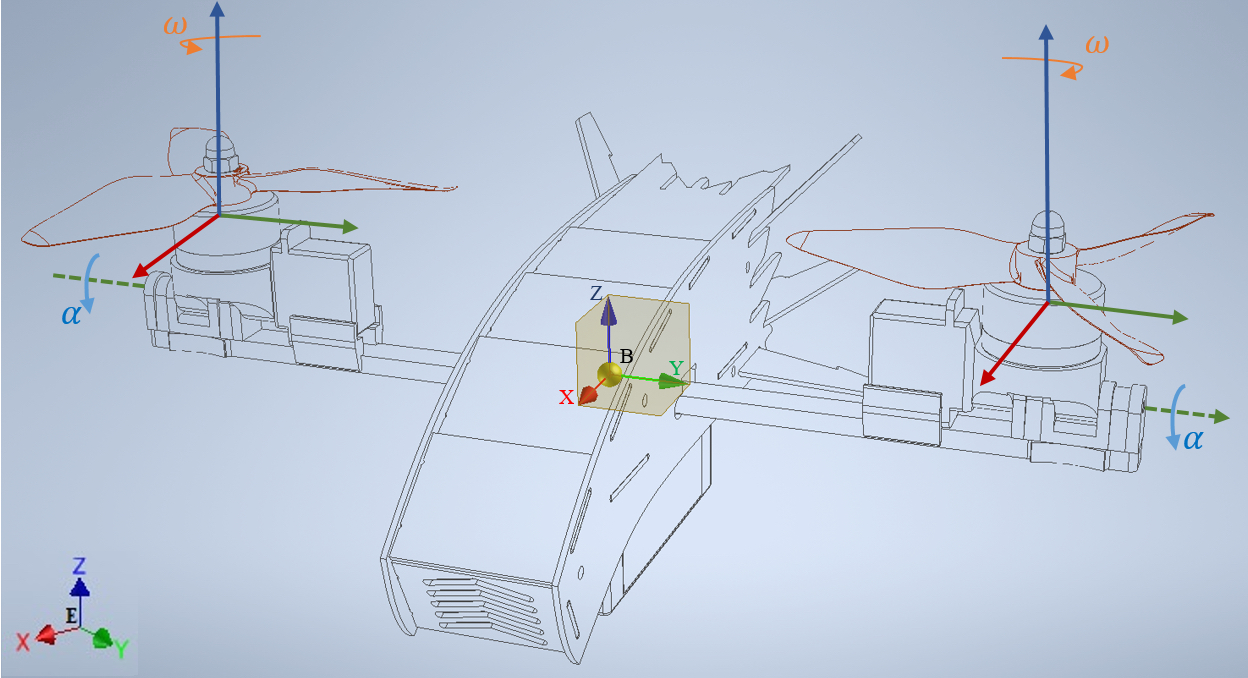
首先,我们来介绍横列式双旋翼两轴飞行器的结构和工作原理。该飞行器由两个对称布置的旋翼组成,每个旋翼的倾转角度可以独立控制。倾转旋翼技术可以实现飞行器在空中的姿态控制和悬停,并且能够在低速飞行时提供更大的升力。两轴控制系统包括内环控制和外环控制,内环控制主要负责姿态稳定,外环控制则用于飞行器的位置和速度控制。
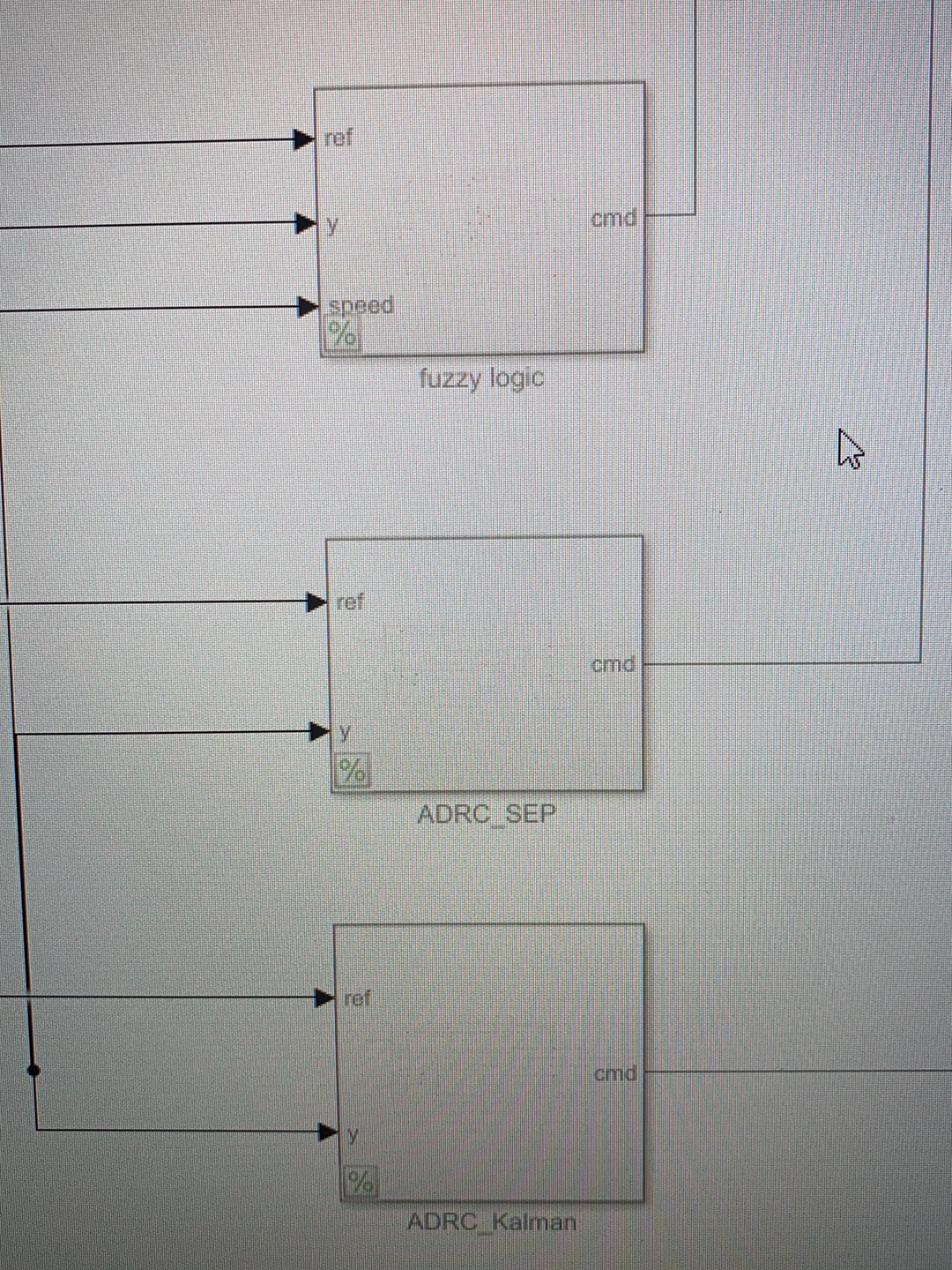
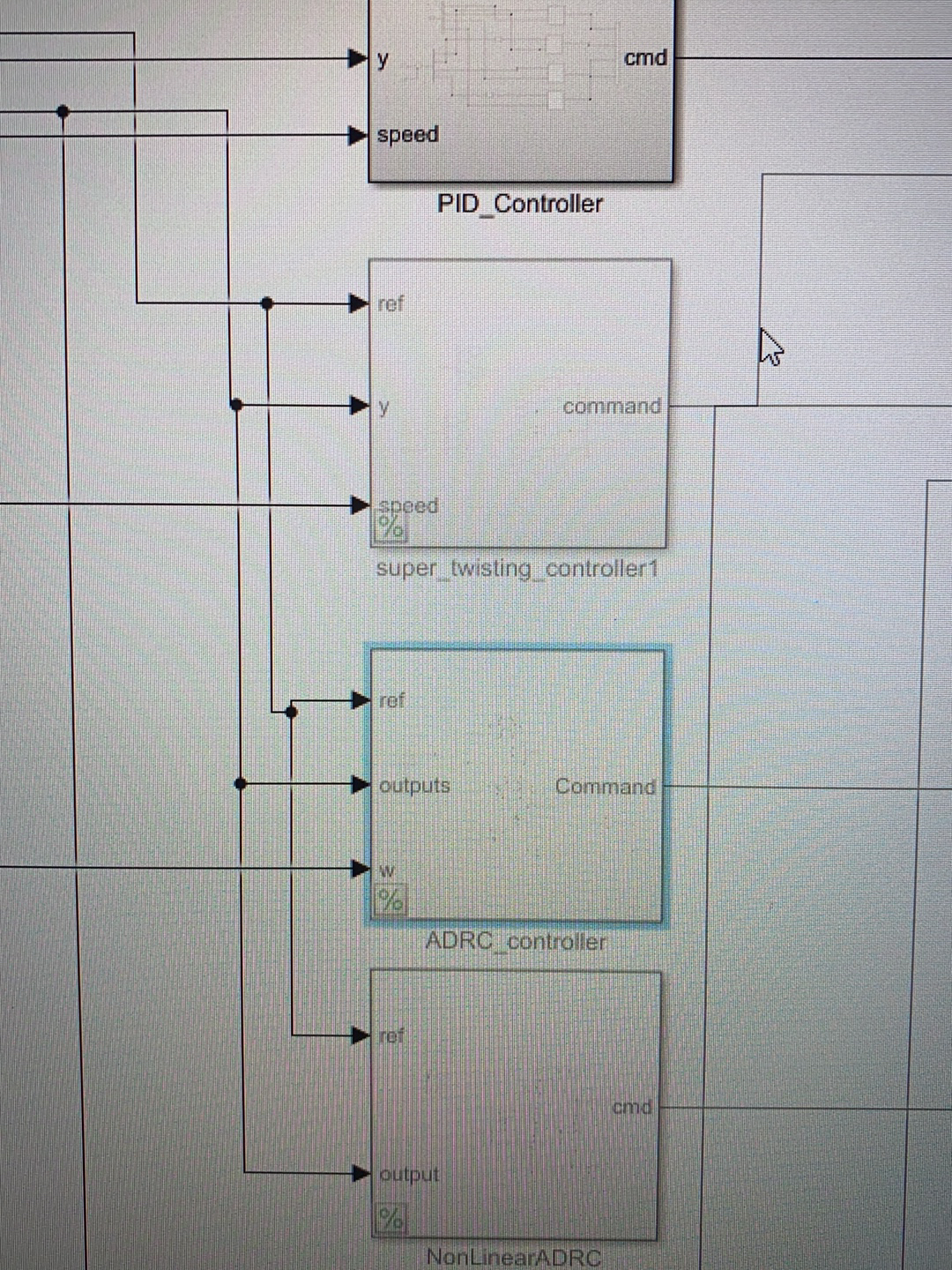
在飞行器的内环控制中,PID(Proportional-Integral-Derivative)控制器是一种常用的控制算法。PID控制器通过比较目标姿态和实际姿态的差异,计算出修正信号,使倾转旋翼恢复到期望的角度。其中,比例项(P)用于校正偏差大小,积分项(I)用于消除积分偏差,导数项(D)用于预测偏差变化趋势。
而在飞行器的外环控制中,PID控制器用于对飞行器的位置和速度进行控制。通过比较目标位置和实际位置,PID控制器计算出修正信号,并作用于飞行器的推力和倾转角度,从而实现定位和移动。外环PID控制的关键是合理设置PID参数,以兼顾响应速度和稳定性。
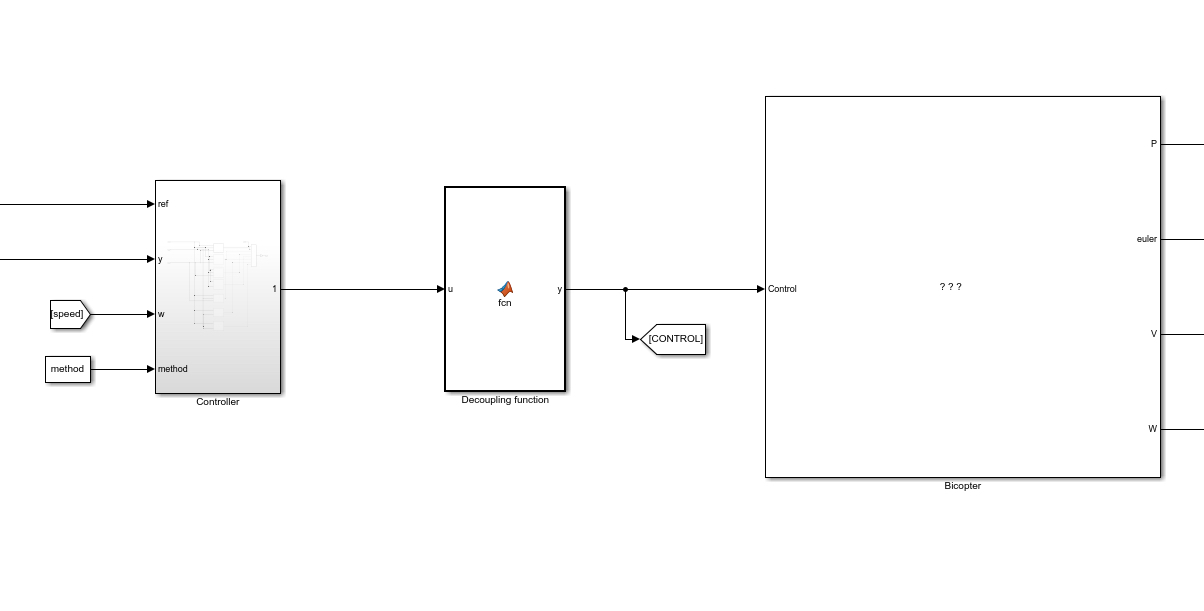
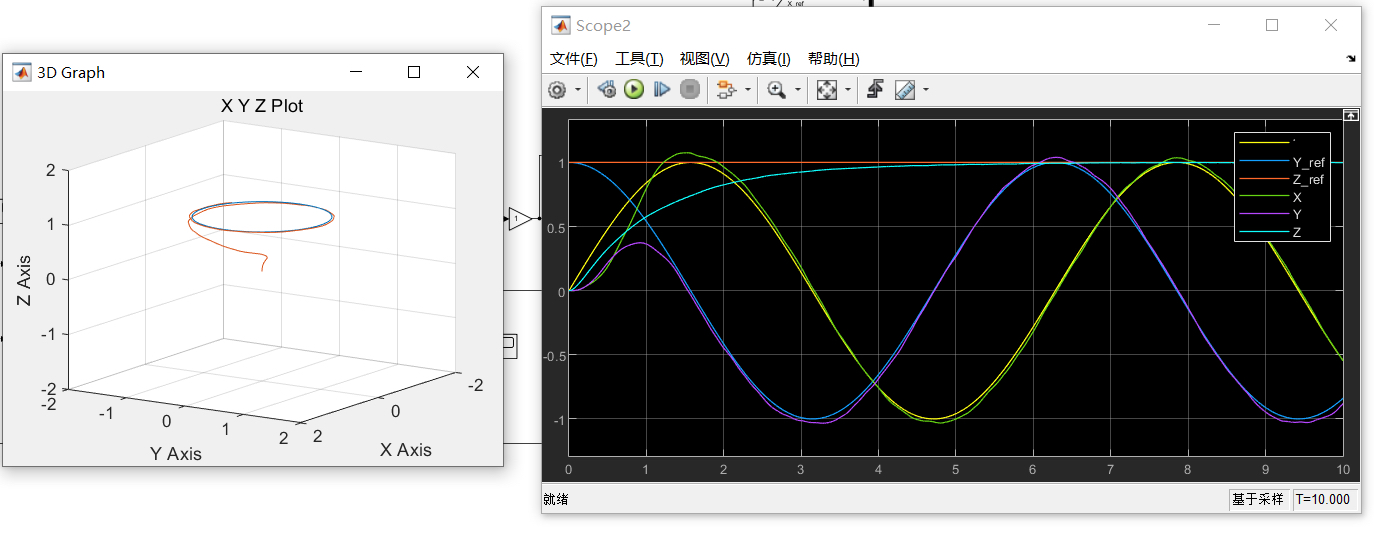
为了验证飞行器的控制系统设计和性能,Simulink是一个理想的仿真平台。Simulink是MATLAB软件中的一种工具,可以用于建立动态系统模型和进行仿真分析。通过Simulink可以建立横列式双旋翼两轴飞行器的数学模型,并将PID控制器结合进模型中,进行姿态和位置的仿真分析。同时,Simulink还可以提供丰富的仿真结果显示和数据处理功能,帮助我们了解飞行器的性能表现和控制策略的有效性。
MATLAB作为一种强大的数学计算工具,可以为飞行器的控制系统设计和优化提供支持。通过MATLAB可以进行PID参数调节和性能评估,快速验证不同参数下的系统响应;还可以通过MATLAB进行PID控制器的自动整定,提高系统的稳定性和鲁棒性。此外,MATLAB还提供了丰富的工具箱,如控制系统工具箱和优化工具箱,可以进一步优化飞行器的控制系统设计。
总结起来,横列式双旋翼两轴飞行器倾转旋翼Simulink仿真MATLAB内环外环PID控制是一项涉及飞行器设计和控制的技术领域。本文围绕这一主题,介绍了飞行器的结构和工作原理,以及内环和外环PID控制的原理和实现方法。同时,我们还介绍了Simulink和MATLAB在飞行器控制系统设计和仿真分析中的应用。通过本文的阐述,希望读者能够对横列式双旋翼两轴飞行器的控制技术有更深入的了解,并能够运用Simulink和MATLAB进行相关的设计和研究工作。
以上相关代码,程序地址:http://wekup.cn/668568032359.html















 1281
1281











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









