






目录
- 一、前言
- 二、CAM
- 1. CAM计算过程
- 2. 代码实现
- 3. 流程图
- 三、SAM
- 1. SAM计算过程
- 2. 代码实现
- 3. 流程图
- 四、YOLOv5中添加CBAM模块
- 参考文章
一、前言
由于卷积操作通过融合通道和空间信息来提取特征(通过 N × N N×N N×N的卷积核与原特征图相乘,融合空间信息;通过不同通道的特征图加权求和,融合通道信息),论文提出的Convolutional Block Attention Module(CBAM)沿两个独立的维度(通道和空间)依次学习特征,然后与学习后的特征图与输入特征图相乘,进行自适应特征细化。

上图可以看到,CBAM包含CAM(Channel Attention Module)和SAM(Spartial Attention Module)两个子模块,分别进行通道和空间上的Attention。这样不只能够节约参数和计算力,并且保证了其能够做为即插即用的模块集成到现有的网络架构中去。
二、CAM
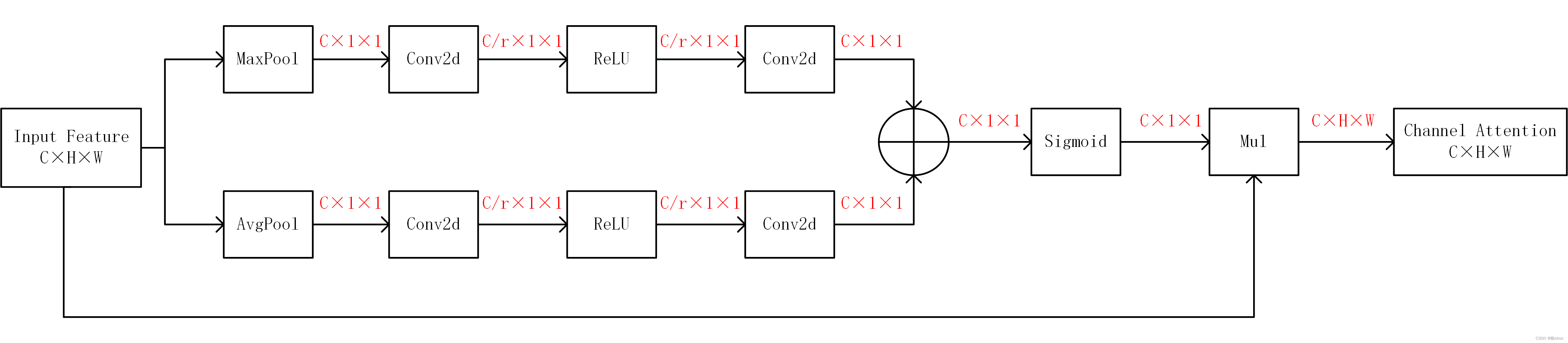
1. CAM计算过程

输入特征图 F F F首先经过两个并行的MaxPool层和AvgPool层,将特征图的维度从 C × H × W C×H×W C×H×W变为 C × 1 × 1 C×1×1 C×1×1,然后经过Shared MLP模块。在该模块中,它先将通道数压缩为原来的 1 / r 1/r 1/r倍,再经过ReLU激活函数,然后扩张到原通道数。将这两个输出结果进行逐元素相加,再通过一个sigmoid激活函数得到Channel Attention的输出结果,然后将这个输出结果与原图相乘,变回 C × H × W C×H×W C×H×W的大小。
上述过程的计算公式如下:
M
c
(
F
)
=
σ
(
M
L
P
(
A
v
g
P
o
o
l
(
F
)
)
+
M
L
P
(
M
a
x
P
o
o
l
(
F
)
)
)
M_{c}(F)=\sigma (MLP(AvgPool(F))+MLP(MaxPool(F)))
Mc(F)=σ(MLP(AvgPool(F))+MLP(MaxPool(F)))
=
σ
(
W
1
(
W
0
(
F
a
v
g
c
)
)
+
W
1
(
W
0
(
F
m
a
x
c
)
)
)
=\sigma (W_{1}(W_{0}(F^{c}_{avg}))+W_{1}(W_{0}(F^{c}_{max})))
=σ(W1(W0(Favgc))+W1(W0(Fmaxc)))
其中, σ \sigma σ代表sigmoid激活函数, W 0 ∈ R C / r × C W_{0}\in R^{C/r\times C} W0∈RC/r×C, W 1 ∈ R C × C / r W_{1}\in R^{C\times C/r} W1∈RC×C/r,且MLP的权重 W 0 W_{0} W0和 W 1 W_{1} W1对于输入来说是共享的,ReLU激活函数位于 W 0 W_{0} W0之后, W 1 W_{1} W1之前。
2. 代码实现
class ChannelAttention(nn.Module):
def __init__(self, in_planes, ratio=16):
super(ChannelAttention, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.f1 = nn.Conv2d(in_planes, in_planes // ratio, 1, bias=False) # 上面公式中的W0
self.relu = nn.ReLU()
self.f2 = nn.Conv2d(in_planes // ratio, in_planes, 1, bias=False) # 上面公式中的W1
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = self.f2(self.relu(self.f1(self.avg_pool(x))))
max_out = self.f2(self.relu(self.f1(self.max_pool(x))))
out = self.sigmoid(avg_out + max_out)
return torch.mul(x, out)
3. 流程图
CAM过程的详细流程如下图所示:
三、SAM
1. SAM计算过程

将Channel Attention的输出结果通过最大池化和平均池化得到两个 1 × H × W 1×H×W 1×H×W的特征图,然后经过Concat操作对两个特征图进行拼接,再通过 7 × 7 7×7 7×7卷积将特征图的通道数变为 1 1 1(实验证明 7 × 7 7×7 7×7效果比 3 × 3 3×3 3×3好),再经过一个sigmoid得到Spatial Attention的特征图,最后将输出结果与原输入特征图相乘,变回CHW大小。
上述过程的计算公式如下:
M s ( F ) = σ ( f 7 × 7 ( [ A v g P o o l ( F ) ; M a x P o o l ( F ) ] ) ) M_{s}(F)=\sigma (f^{7\times 7}([AvgPool(F);MaxPool(F)])) Ms(F)=σ(f7×7([AvgPool(F);MaxPool(F)]))
= σ ( f 7 × 7 ( [ F a v g s ; F m a x s ] ) ) =\sigma (f^{7\times 7}([F^{s}_{avg};F^{s}_{max}])) =σ(f7×7([Favgs;Fmaxs]))
其中, σ \sigma σ代表sigmoid激活函数, f 7 × 7 f^{7\times 7} f7×7代表卷积核大小为 7 × 7 7×7 7×7的卷积过程。
2. 代码实现
class SpatialAttention(nn.Module):
def __init__(self, kernel_size=7):
super(SpatialAttention, self).__init__()
assert kernel_size in (3, 7), 'kernel size must be 3 or 7'
padding = 3 if kernel_size == 7 else 1
self.conv = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = torch.mean(x, dim=1, keepdim=True)
max_out, _ = torch.max(x, dim=1, keepdim=True)
out = torch.cat([avg_out, max_out], dim=1)
out = self.sigmoid(self.conv(out))
return torch.mul(x, out)
3. 流程图
SAM过程的详细流程如下图所示:

四、YOLOv5中添加CBAM模块
- 修改common.py
在common.py中添加下列代码:
class ChannelAttention(nn.Module):
def __init__(self, in_planes, ratio=16):
super(ChannelAttention, self).__init__()
self.avg_pool = nn.AdaptiveAvgPool2d(1)
self.max_pool = nn.AdaptiveMaxPool2d(1)
self.f1 = nn.Conv2d(in_planes, in_planes // ratio, 1, bias=False)
self.relu = nn.ReLU()
self.f2 = nn.Conv2d(in_planes // ratio, in_planes, 1, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = self.f2(self.relu(self.f1(self.avg_pool(x))))
max_out = self.f2(self.relu(self.f1(self.max_pool(x))))
out = self.sigmoid(avg_out + max_out)
return torch.mul(x, out)
class SpatialAttention(nn.Module):
def __init__(self, kernel_size=7):
super(SpatialAttention, self).__init__()
assert kernel_size in (3, 7), 'kernel size must be 3 or 7'
padding = 3 if kernel_size == 7 else 1
self.conv = nn.Conv2d(2, 1, kernel_size, padding=padding, bias=False)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
avg_out = torch.mean(x, dim=1, keepdim=True)
max_out, _ = torch.max(x, dim=1, keepdim=True)
out = torch.cat([avg_out, max_out], dim=1)
out = self.sigmoid(self.conv(out))
return torch.mul(x, out)
class CBAMC3(nn.Module):
# CSP Bottleneck with 3 convolutions
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion
super(CBAMC3, self).__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1)
self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)])
self.channel_attention = ChannelAttention(c2, 16)
self.spatial_attention = SpatialAttention(7)
def forward(self, x):
# 将最后的标准卷积模块改为了注意力机制提取特征
return self.spatial_attention(
self.channel_attention(self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), dim=1))))
- 修改yolo.py
在yolo.py的if m in [Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, DWConv, MixConv2d, Focus, CrossConv, BottleneckCSP, C3, C3TR,......]中添加CBAMC3,即修改后的代码为:
if m in [Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, DWConv, MixConv2d, Focus, CrossConv, BottleneckCSP,
C3, C3TR, ASPP, CBAMC3]:
c1, c2 = ch[f], args[0]
if c2 != no:
c2 = make_divisible(c2 * gw, 8)
args = [c1, c2, *args[1:]]
- 修改yolov5s.yaml
修改后的yolov5s.yaml如下:
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:
- [10,13, 16,30, 33,23] # P3/8
- [30,61, 62,45, 59,119] # P4/16
- [116,90, 156,198, 373,326] # P5/32
# YOLOv5 v6.0 backbone
backbone:
# [from, number, module, args]
[[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2
[-1, 1, Conv, [128, 3, 2]], # 1-P2/4
[-1, 3, CBAMC3, [128]],
[-1, 1, Conv, [256, 3, 2]], # 3-P3/8
[-1, 6, CBAMC3, [256]],
[-1, 1, Conv, [512, 3, 2]], # 5-P4/16
[-1, 9, CBAMC3, [512]],
[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32
[-1, 3, CBAMC3, [1024]],
[-1, 1, SPPF, [1024, 5]], # 9
]
# YOLOv5 v6.0 head
head:
[[-1, 1, Conv, [512, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 6], 1, Concat, [1]], # cat backbone P4
[-1, 3, C3, [512, False]], # 13
[-1, 1, Conv, [256, 1, 1]],
[-1, 1, nn.Upsample, [None, 2, 'nearest']],
[[-1, 4], 1, Concat, [1]], # cat backbone P3
[-1, 3, C3, [256, False]], # 17 (P3/8-small)
[-1, 1, Conv, [256, 3, 2]],
[[-1, 14], 1, Concat, [1]], # cat head P4
[-1, 3, C3, [512, False]], # 20 (P4/16-medium)
[-1, 1, Conv, [512, 3, 2]],
[[-1, 10], 1, Concat, [1]], # cat head P5
[-1, 3, C3, [1024, False]], # 23 (P5/32-large)
[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)
]



















 165
165

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











